REPORT DOCUMENTATION PAGE
|
Form Approved OMB No. 0704-0188
|
|
Public reporting burden
for this collection of information is estimated to average 1 hour per
response, including the time for reviewing instruction, searching existing
data sources, gathering and maintaining the data needed, and completing and
reviewing the collection of information. Send comments regarding this burden
estimate or any other aspect of this collection of information, including
suggestions for reducing this burden, to Washington headquarters Services,
Directorate for Information Operations and Reports, 1215 Jefferson Davis
Highway, Suite 1204, Arlington, VA 22202-4302, and to the Office of
Management and Budget, Paperwork Reduction Project (0704-0188) Washington DC 20503.
|
|
1.
AGENCY USE ONLY (Leave blank)
|
2. REPORT DATE
|
3. REPORT TYPE AND DATES
COVERED
Master’s Thesis
|
|
4. TITLE AND SUBTITLE: Autonomous Agent-Based Simulation Of A Model
Simulating The Human Air-threat Assessment Process
|
5.
FUNDING NUMBERS
|
|
6.
AUTHOR(S) Baris Egemen OZKAN
|
|
7.
PERFORMING ORGANIZATION NAME(S) AND ADDRESS(ES)
Naval Postgraduate School Monterey, CA 93943-5000
|
8. PERFORMING ORGANIZATION REPORT NUMBER
|
|
9.
SPONSORING /MONITORING AGENCY NAME(S) AND ADDRESS(ES) N/A
|
10. SPONSORING/MONITORING
AGENCY REPORT NUMBER
|
|
11.
SUPPLEMENTARY NOTES The views
expressed in this thesis are those of the author and do not reflect the
official policy or position of the Department of Defense or the U.S.
Government.
|
|
12a.
DISTRIBUTION / AVAILABILITY STATEMENT
Approved for public
release; distribution is unlimited
|
12b.
DISTRIBUTION CODE
|
|
13.
ABSTRACT (maximum 200 words)
The Air Defense Laboratory (ADL) Simulation is a software
program that models the way an air-defense officer thinks in the threat
assessment process. The model uses multi-agent system (MAS) technology and is
implemented in Java programming language. This research is a portion of Red
Intent Project whose goal is to ultimately implement a model to predict the
intent of any given track in the environment. For any air track in the
simulation, two sets of agents are created, one for controlling track actions
and one for predicting its identity and intent based on information received
from track, the geopolitical situation and intelligence. The simulation is
also capable of identifying coordinated actions between air tracks. We used
three kinds of aircraft behavior in the simulation: civilian, friendly and
enemy. Predictor agents are constructed in a layered structure and use
"conceptual blending" in their decision-making processes using
mental spaces and integration networks. Mental spaces are connected to each
other via connectors and connecters trigger tickets. Connectors and Tickets
were implemented using the Connector-based Multi Agent System (CMAS) library.
This thesis showed that the advances of Cognitive Science and Linguistics can
be used to make our software more cognitive. This simulation is one of the
first applications to use cognitive blending theory for a military
application. We demonstrated that agents can create an “integration network”
composed of “mental spaces” and retrieve any mental space data inside the
network immediately without traversing the entire network by using the CMAS
library. The results of the tests of the simulation showed that the ADL
Simulation can be used as assistant to human air-defense personnel to
increase accuracy and decrease reaction time in naval air threat assessment.
|
|
|
15. NUMBER OF PAGES
120
|
|
16. PRICE CODE
|
|
17. SECURITY
CLASSIFICATION OF REPORT
Unclassified
|
18. SECURITY CLASSIFICATION OF THIS PAGE
Unclassified
|
19. SECURITY CLASSIFICATION OF ABSTRACT
Unclassified
|
20. LIMITATION OF ABSTRACT
UL
|
|
|
|
|
|
|
|
NSN 7540-01-280-5500 Standard Form 298
(Rev. 2-89)
Prescribed
by ANSI Std. 239-18
THIS PAGE INTENTIONALLY LEFT BLANK
Approved for public release; distribution is unlimited
AUTONOMOUS AGENT-BASED SIMULATION OF A MODEL SIMULATING THE
HUMAN AIR-THREAT ASSESSMENT PROCESS
Baris E. OZKAN
Lieutenant Junior Grade, Turkish Navy
B.S., Turkish Naval Academy, 1998
Submitted in partial fulfillment of the
requirements for the degree of
MASTER OF SCIENCE IN COMPUTER SCIENCE
from the
NAVAL POSTGRADUATE SCHOOL
March 2004
Author: Baris Egemen OZKAN
Thesis Co-Advisor
Neil Rowe
Thesis Co-Advisor
Chris Darken
Second Reader
Peter J. Denning
Chairman, Department of Computer
Science
THIS PAGE INTENTIONALLY LEFT BLANK
ABSTRACT
The Air Defense Laboratory (ADL) Simulation is a software
program that models the way an air-defense officer thinks in the threat
assessment process. The model uses multi-agent system (MAS) technology and is implemented
in Java programming language. This research is a portion of Red Intent Project
whose goal is to ultimately implement a model to predict the intent of any
given track in the environment. For any air track in the simulation, two sets
of agents are created, one for controlling track actions and one for predicting
its identity and intent based on information received from track, the
geopolitical situation and intelligence. The simulation is also capable of
identifying coordinated actions between air tracks. We used three kinds of
aircraft behavior in the simulation: civilian, friendly and enemy. Predictor
agents are constructed in a layered structure and use "conceptual
blending" in their decision-making processes using mental spaces and integration
networks. Mental spaces are connected to each other via connectors and
connecters trigger tickets. Connectors and Tickets were implemented using the
Connector-based Multi Agent System (CMAS) library. This simulation is one of the
first applications to use cognitive blending theory for a military application.
We demonstrated that agents can create an “integration network” composed of “mental
spaces” and retrieve any mental space data inside the network immediately
without traversing the entire network by using the CMAS library. The results of
the tests of the simulation showed that the ADL Simulation can be used as
assistant to human air-defense personnel to increase accuracy and decrease
reaction time in naval air-threat assessment.
THIS PAGE INTENTIONALLY LEFT BLANK
TABLE OF CONTENTS
I. introduction........................................................................................................ 1
a. THE air-defense laboratory Simulation............................... 1
b. motivation for the ADL Simulation............................................ 2
C. Multi-agent systems in ADL Simulation................................... 4
II. CONCEPTUAL BLENDING THEORY................................................................... 9
A. introduction to conceptual blending
theory................ 9
B. Forms............................................................................................................ 9
C. principles of blending................................................................... 10
D. networks OF SPACES in blending theory............................ 13
1. Simplex
Networks.......................................................................... 16
2. Mirror
Networks.............................................................................. 17
E. NETWORKS IN THE ADL Simulation................................................ 18
F. alternative ways to blending theory
and cmas library for adl simulation................................................................................................ 19
iII. RELATED WORK IN NAVAL AIR-THREAT
ASSESSMENT......................... 21
A. RELAted work
introduction........................................................ 21
B. adversarial plan recognItion for
airborne threats 21
C. NAVAL AIR-DEFENSE THREAT ASSESSMENT:
COGNITIVE FACTORS AND MODEL......................................................................................................................... 22
D. air-threat assessment: research, model
and display guidelines 24
E. Simulation of an Aegis Cruiser Combat
Information Center 25
F. multisensor data fusion............................................................... 27
g. multisensor data fusion............................................................... 28
H. COMParison WITH OTHER AIR-DEFENSE WORK....................... 29
IV. multi-agent systems and DESCRIPTION OF
AIR DEFENSE LABORATORY SIMULATion............................................................................................................ 31
A. program language and system
requirements for adl simulation 31
B. multi-agent systems and THE CMAS
LIBRARY...................... 31
1. Agents............................................................................................... 31
2. Connector
Based Multi-Agent Systems and CMAS Library 32
a. Connectors.......................................................................... 32
b. Tickets................................................................................... 34
c. Ticket & Connector Structures........................................ 35
d. The CMAS Library.............................................................. 36
C. MENU OPTIONS.......................................................................................... 36
D. Toolbar Options.................................................................................. 42
E. Output Panel......................................................................................... 44
F. java xml integration........................................................................ 44
V. design of the adl simulation program............................................. 47
A. Introduction.......................................................................................... 47
B. Real Track Agents............................................................................. 47
1. Civilian
Aircraft Track Agent........................................................ 48
2. Friendly
Aircraft Track Agent...................................................... 49
3. Enemy
Aircraft Track Agent......................................................... 50
4. Coordinated
Detachment Attack Track Agent........................ 52
5. Missile
Attack Track Agent........................................................... 53
6. Missile
Track Agent........................................................................ 54
7. User
derived Track Agent............................................................ 54
C. Reactive Agents.................................................................................. 54
1. Airlane
Reactive Agent.................................................................. 55
2. ESM
Reactive Agent...................................................................... 56
3. Heading-change
Reactive Agent............................................... 57
4. IFF
Reactive Agents....................................................................... 57
5. Max
Acceleration, Altitude, and Speed Reactive Agents..... 58
6. Origin
Reactive Agent................................................................... 60
7. Radar
Status Reactive Agent...................................................... 60
8 Random
Number Finder Reactive Agent................................. 60
9. Snooper
Detector Reactive Agent............................................. 62
D. Predictor Track Agents................................................................ 63
1. Predictor
Agent Connectors and Queries............................... 64
2. Predictor
Agent Competing Models.......................................... 66
3. Predictor
Agent Tickets................................................................ 66
4. Weighting
Procedure for the Predictor Track Agent............. 71
a. Weighting the Civilian Ticket............................................ 72
b. Weighting the Friendly Ticket.......................................... 72
c. Weighting the Hostile Ticket............................................ 73
d. Weighting the Suspect Ticket.......................................... 75
e. Weighting the Unknown Ticket....................................... 75
f. Execution of the ATO Ticket............................................ 75
g. Execution of IFF Evaluation Ticket................................ 76
h. Execution of CPA Ticket................................................... 77
i. Split Activity Detection...................................................... 77
E. THE Regional Agent........................................................................... 78
f. Blending theory and the ADL Simulation............................ 81
VI. RESEARCH QUESTIONs RESULTS AND THE EVAULATION OF THE
SIMULATION 85
a. Research Questions......................................................................... 85
1. Overview........................................................................................... 85
1. General
Testing Methodology..................................................... 85
b. the level of reality of the ADL
simulation....................... 86
C. the accuracy of the decisions by the
adl simulation 87
D. the level of closeness of decisions
given by the model to the decisions given by the experts................................................. 90
VII. FUTURE WORK AND DEVELOPMENT OF THE AIR
DEFENSE LABoRATORY SIMULATOR..................................................................................................................................... 91
a. Future work introduction.......................................................... 91
b. Development of the environment........................................... 91
c. Integrated knowledge transfer........................................... 91
d. THE adl simulation as a training tool................................... 92
e. implementing THE adl simulation WITH
bayesian methodS 93
VIII. SUMMARY AND CONCLUSION.......................................................................... 95
list of references.................................................................................................... 97
INITIAL DISTRIBUTION LIST......................................................................................... 101
THIS PAGE INTENTIONALLY LEFT BLANK
LIST OF FIGURES
Figure 1. ADL
Simulation Interface................................................................................ 2
Figure 2. ADL
Simulation MAS Layout......................................................................... 5
Figure 3. Conceptual
Blending (After [1]).................................................................... 11
Figure 4. Conceptual
Integration Network................................................................... 14
Figure 5. Simplex
Network (After [1]).......................................................................... 16
Figure 6. Mirror
Network (After [1]).............................................................................. 18
Figure 7. Cognitively-Based
Model of Threat Assessment (From [20]).................. 23
Figure 8. Threat
Assessment Model (From [22])....................................................... 24
Figure 9. Contact
Classification Artificial Neuron (From [24]).................................. 26
Figure 10. Connector
States.......................................................................................... 33
Figure 11. Visual
Design of the ADL Simulation.......................................................... 37
Figure 12. Tactical
Figure Control Panel...................................................................... 38
Figure 13. Track
Generator Panel................................................................................. 38
Figure 14. Coordinated
Detachment Attack................................................................. 39
Figure 15. Evaluation
of Model Panel............................................................................ 41
Figure 16. Track
Info pages............................................................................................ 42
Figure 17. Regional
Agent and Track Agent Connectors Frames............................. 43
Figure 18. Competing
Models Frame........................................................................... 43
Figure 19. Simulation
Output Panel............................................................................... 44
Figure 20. Coordinated
Detachment Attack Profile..................................................... 53
Figure 21. ADL
Simulation Layered Structure.............................................................. 55
Figure 22. ADL
Random Number Finder Reactive Agent Equation.......................... 61
Figure 23. Snooper
Detector Reactive Agent Equation.............................................. 63
Figure 24. Civilian
Ticket and Frames.......................................................................... 67
Figure 25. A
Friendly Ticket and Frames...................................................................... 68
Figure 26. Hostile
Ticket and Frames........................................................................... 68
Figure 27. Suspect
Ticket and Frames......................................................................... 69
Figure 28. Unknown
Ticket and Frames....................................................................... 69
Figure 29. Connecting
Local Independent Ticket Integration Network to Identity Integration Network 70
Figure 30. IFF
Evaluation Independent Ticket.............................................................. 71
Figure 31. Evaluation
of ATO Frame of Hostile Ticket............................................... 76
Figure 32. Predictor
Agent Split Activity Detector Ticket............................................ 77
Figure 33. Regional
Agent Snooper Detector Ticket.................................................. 80
Figure 34. Merge
Detector Blending Operation........................................................... 81
THIS PAGE INTENTIONALLY LEFT BLANK
LIST OF TABLES
Table 1. Default
Classification Threshold Values(From [24]).................................. 26
Table 2. Scoring
(Weighted) Values for Various Input Cues(From [24])............... 27
Table 3. Civilian
Aircraft Attributes and Behaviors................................................... 48
Table 4. Friendly
Aircraft Missions [28]..................................................................... 49
Table 5. Friendly
Aircraft Attributes and Behaviors.................................................. 50
Table 6. Enemy
Aircraft Missions [28]....................................................................... 51
Table 7. Enemy
Aircraft Attributes and Behaviors.................................................... 52
Table 8. ESM
Reactive-agent Messages to Track Agent....................................... 57
Table 9. IFF
System Modes and Concepts............................................................... 58
Table 10. Sample
Error Percentage Limits................................................................. 61
Table 11. Predictor
Track Agent Connectors and Queries....................................... 66
Table 12. Regional
Agent Connectors and Queries................................................... 79
Table 13. Scenarios
Used in the Simulation Test and Analysis................................ 86
Table 14. Civilian
Aircraft ID Results of Tests............................................................. 88
Table 15. Friendly
Aircraft ID Results of Tests............................................................ 88
Table 16. Hostile
Aircraft ID Results of Tests.............................................................. 89
THIS PAGE INTENTIONALLY LEFT BLANK
ACKNOWLEDGMENTS
This thesis is the culmination of my military experience
and education. As an Anti-Air Warfare Officer (AAWO) of TCG ORUCREIS (F-245)
and a master degree student at Naval Postgraduate School, I was able to blend
both theory and application from my personal experience to my thesis. I have combined
my naval air defensive warfare experience with the computer science knowledge
that I gained at Naval Postgraduate School. I am grateful to everyone who
helped me in achieving my goals especially my senior officers who taught me air
warfare concepts, my air-defense team on the ship, and all of my instructors at
the Naval Postgraduate School. Special thanks to Prof. John Hiles, Prof. Neil C. Rowe and Prof. Chris Darken.
I also would like to thank my family members for their
endlessly supporting me and for being in my life. I am so grateful to my mom
for showing me how to be strong in life and keep up with the struggles of life
by beating two different cancers. I am very thankful to my father for inspiring
me to one day be as a great father as he is. I am also thankful to Basar, my
brother, for being the best brother imaginable.
I also would like to thank my girlfriend, Jennifer M. Courtney, for joining my life and sharing her life with me. Her help and support was
key in the completion of my thesis.
THIS PAGE INTENTIONALLY LEFT BLANK
The Air Defense Laboratory (ADL) Simulation is a software
program which simulates an Anti-Air Warfare (AAW) Officer’s threat assessment
process in the Combat Information Center (CIC) of a frigate performing air
defense. ADL is a software cognitive model implemented in the Java programming
language. It is user-interactive in that it allows users to manipulate input
data and create realistic air-defense scenarios. The program simulates the
mental processes performed by an AAW Officer in the threat-assessment phase. It
uses multiagent systems technology and the Connector Based Multi-Agent Systems
(CMAS) Library written by the Integrated Asymmetric Goal Organization (IAGO)
team at the Naval Postgraduate School. The cognitive model implements
Conceptual Blending Theory as proposed by Turner and Fauconnier[1].
The ADL Simulation has two goals, one short-term and one
long-term. In the short term, the simulation aims to assist air-defense teams
to gain insight about air-threat assessment and to support the team in
decision-making under stressful conditions. The air-defense crew may create
queries for a specific air track and receive advice and predictions about the possible
intentions of the track from the simulation. Differently from most other
approaches in which the only final decision is presented, the ADL Simulation
also gives the user reasons as to why the steps towards a decision are made by
traversing backwards each node of an "integration network" that is
created in the model. In the long term, the ADL Simulation aims to improve decisionmaking
and air-threat assessment duties of the Anti-Air Warfare Officer. Currently in
naval technology, the primary use of unmanned sensory vehicles is
reconnaissance. In the future, when the cognitive models like that of the ADL
Simulation are embedded in these vehicles, they will be able to make decisions
and take actions in the field. This would save much time, money, and human
resources that are currently used. This would also limit the placement of
humans in dangerous situations and the loss of life or additional risks that
accompany these decisions.
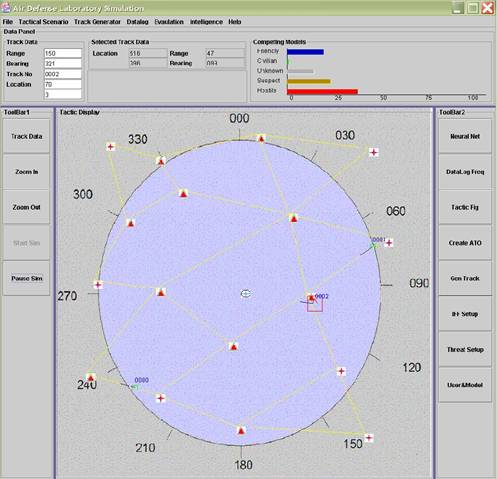
Figure 1.
ADL Simulation Interface
Naval air warfare is the most rapid and intense
traditional warfare. If not properly executed it could result in severe
destruction. The attacker has the advantage of speed, flexibility of the attack
axis, direction, and time. With a well-coordinated attack, a ship’s
self-defense systems may also be saturated with overwhelming data. This
requires that a naval unit focus on expertly training their air-defense teams
and maximize their proficiency level.
Currently there are two types of training for air-defense
teams. The first is the training with actual aircraft at sea and the second is
training with simulated tracks. Even though the simulators are well designed
and represent the reality of air warfare, they suffer from being a simulation
in the air-defense team’s minds and do not provide the realistic atmosphere and
the factors associated stressful conditions. Realistic training requires the
use of the actual aircraft and other relevant training components, a huge
amount of resources, and pre-coordination between the air assets and the naval
unit. A naval force without an aircraft carrier has to arrange all of this
coordination. Most of the time, training with real air assets is short due to
the limited flight time of aircraft. This motivates the need for new simulators
better representing the real world to assist air-defense teams in naval air
warfare.
Another way to increase success in defensive air warfare
and to compensate for the disadvantage of being on the defensive side is to
assist the air-defense team in the command-and-control systems in the CIC.
These embedded systems support the air-defense crew in threat assessment by
showing threat priorities, sorting threats based on priorities, and reminding
the air-defense team of the Anti-Ship Missile Defense (ASMD) procedures. There
has been a great deal of work done to increase the efficiency of the supporting
software embedded in the command-and-control systems. This is especially
relevant because of two high-profile incidents concerning the USS Vincennes and
USS Stark. On March 17, 1987 a Mirage F-1 fighter jet, took off from Iraq's Shaibah military airbase. It was detected by both USS Stark and an Airborne Warning
and Control System (AWACS) plane. The attacker Mirage released its load and
headed to the north but the USS Stark and the AWACS did not detect the
missiles. On July 3, 1988, 15 months after the previous incident, USS Vincennes
shot down a civilian Iranian Airliner carrying 290 people after falsely
identifying it as an attacking aircraft. The reports released after these two
events clearly revealed the importance of the human factor in air defense. In
both incidents, the lack of correct decision-making about the situation and
situational awareness had a catastrophic result.
After these incidents, U.S. Navy research focused on
assisting humans in air defense using the fields of artificial intelligence
(AI) and display technologies. The ADL Simulation deals mostly with the AI and
aims to assist the air-defense crew. The post-Stark and post-Vincennes research
supporting air-defense teams in the AI field is discussed in Chapter III.
The ADL Simulation uses Multi-Agent System (MAS)
technology. “A basic Multi Agent System (MAS) is an electronic or computing
model made of artificial entities that communicate with each other and act in
an environment.” [2] Agents are autonomous software elements operating and
interacting with each other in that environment.
MAS’s are comprised of six components: an environment (E)
which is the space where agents operate, the objects (O) in the environment,
actors (A), relations (R) between actors and the environment and between
agents, operations (Ops) that are executed by actors, and laws of the
environment.
MAS = {E, O, A, R, Ops, Laws}
Agents in a MAS environment receive input from the
environment, process this input and produce an output. This output is
eventually released to the environment by the agents. The environment may have
more than one agent in it and provides communication facilities to all agents.
Its architecture is usually formulated as sense-process-act.
The environment in the ADL Simulation is the airspace
containing air assets and the air-defense ship equipped with satisfactory
air-defense sensors. One class of objects are the sensory devices of the ship
which provide input information to threat assessors. There are mainly two kinds
of agents in ADL Simulation: Real-track agents (offensive) and predictor agents
(defensive). Real-track agents control aircraft activities based on the type of
the aircraft. Predictor agents receive sensory data produced by real-track
agents and generate a prediction about the identity and possible intent of the
aircraft. Predictor agents are designed in a layered architecture. At the very
bottom level of prediction, reactive agents reside. They are responsible for
each factor in air-threat assessment, discussed in detail in Chapters III and V.
The track agents are located above reactive agents and are responsible for
combining all information provided by reactive agents. Regional agents are
above the track agents and are responsible for identifying coordinated
activities between air tracks. Communication between agents is provided by
connectors implemented with the CMAS library, as discussed in detail in Chapter
V.

Figure 2.
ADL Simulation MAS Layout
Predictor agents figure out the identity of the aircraft
and their possible intentions. There are four kinds of aircraft in the
simulation: civilian, military friendly, military hostile and user-defined ones.
Civilian and friendly aircraft take no hostile action and are generated
randomly by the Track Manager. User-defined aircraft are generated via the user
interface.
The time difference between the initial detection of an
air track and the time when the air track represents a threat for the ship is
relatively short in air warfare with respect to other kinds of warfare. This
forces the air-defense team to evaluate all the sensory data including
kinematics of aircraft, history data, the geopolitical situation, and
intelligence in a short time and carefully. The team then must synthesize this
information, make a decision about the identity of the aircraft, and take
appropriate action. Actions are limited to the Rules of Engagements (ROE). But
ROEs are strict guidelines and usually the actions are based on the identities
of the contact of interests. Therefore the main task is to identify the air
tracks and then look up the ROEs to take proper action. Wrong identification
causes wrong actions as with the USS Vincennes incident. Air warfare leaves
limited time to make the right decision. Today’s technology has brought us
computers with ever-increasing speed that can help meet the time constraints of
air warfare. They are also indifferent to stress which would eliminate factors
related to human error, i.e. fatigue, making wrong decisions under stress, and
lack of experience. Calfee in his master thesis at NPGS modeled the impact of
fatigue, stress and experience on humans in air defense using software decisionmaking
processes. The results evidently show the impacts of human related deficiencies
on air warfare. For the above mentioned reasons, the ADL Simulation uses
computers to resolve problems, help air-defense teams in identifying tracks,
and making correct actions.
The ADL Simulation differs from previous research in that
it uses conceptual blending theory for the cognitive model. This theory
explains how the human brain constructs meaning in the mind. It was primarily
developed in linguistics and all the examples provided by Turner and Fauconnier
come from that area. The ADL Simulation is a software implementation of
Blending Theory in a scientific field. The ADL Simulation has the advantage of
using CMAS Library to simplify its modeling. Part of the library is support for
Connectors and Tickets. Connectors are communication devices between agents in
the environment and let us apply real-like world scenarios to software and
create the integration network of Blending Theory. Connectors in CMAS library
enable agents in the environment to communicate with each other without a
direct relation or a global controller. Tickets are procedural instructions for
agents and data organizing systems. Connectors and Tickets are discussed in
Chapter IV. By using these techniques to anticipate the intent of an air
contact, the simulation comes close to the ways that human CIC personnel create
meaning that integrates the intent and the possible threat of the air contacts.
The results of the ADL Simulation showed that the agents
in the simulation created an Integration network of which the nodes are mental
spaces containing instant information. The agents made their decision as the
way a human air-defense officer did in shorter time period and with same
accuracy. The results opened a new way to extend this project to its second
goal. Using CMAS library was key to developing the simulation and extending it
to second goal.
THIS PAGE INTENTIONALLY LEFT BLANK
Conceptual Blending Theory proposed by Giles Fauconnier and Mark Turner is a theory of reasoning in the human brain [3]. How do we
understand the things happening around us? How do we give meanings to the events?
How do we combine multiple actions? For many years both scientists and
non-scientific people have been searching for the answers. The short
explanation to these questions involves evolution, an ongoing process that
could last millions or billions of years. Most people use their reasoning
ability to rationalize the events that happen around them without wondering how
they are able to do this. We take advantage of the fact that we can think
rather than questioning why we can. Conceptual blending theory is one way of explaining
how we think, give meaning to what is happening around us, integrate this
information, learn, and eventually gain experience with age. Blending is the
key to this theory. Humans are constantly blending as they talk, imagine,
listen and in every other action imaginable. It is integration of processes
that we blend in our minds as we do all these activities.
Forms are the most common way to
represent things around us. One of the most commonly used forms is language.
People communicate with each other with a complex system of forms known as
languages. These languages may be either verbal languages like English, German,
Spanish or some symbolic languages like Morse code, flags, searchlights, ASL
(American Sign Language), or even smoke. We construct sentences, sentences are
composed of words, words consist of letters, and letters are nothing but little
points and lines drawn in a particular shape with an associated phoneme. What
actually makes everybody come to the decision that “a” is “a” is not coming
from the nature of the “letter a”; which is the combination of some points and
lines. It is actually the “form” that we wrap around the “letter a”. Since
everyone in the world who speaks a Latin language knows this form, “a” has the
same meaning to everyone that recognizes the form. For the people who do not
know this particular form, “letter a” does not make any sense and similarly for
people who do not know the searchlight language, it is just a blinking light,
not an “SOS” signal.
Considering symbols as a method of
communication, there are diverse forms that we use in our daily life. Many of
these symbols go unnoticed on a daily basis because they are universal. Forms
do not carry meaning themselves. The human brain then works to recognize the
regularities these forms, assign them meanings, and eventually store these
meanings in our brains.
We associate form "wrappers"
with the real-world meanings which prompt a similar meaning in our brains. On
the other hand, two people may give entirely different meaning to the same
sentence. What makes them think in different ways even though the input is the
same? The answer to this question brings us to Turner and
Fauconnier’s “Mind’s Three I’s: Identity,
Integration and Imagination”. The answer could be a combination of
three things: two people could identify the input differently, integrate the
inputs in a different way, or perhaps the new structure that emerged in their
brains is dissimilar because their varied background experience. For that
reason, forms are good but do not explaining everything. There must be
another way to explain how we make meanings. Answer to this question comes from
cognitive science researchers and linguistics who developed Conceptual Blending
Theory.
Conceptual Blending Theory is a complex theory that
explains how humans process the information coming from the environment. “Conceptual Blending is a set of operations for
combining cognitive models in a network of mental spaces.” [4]
Mental spaces are the principle entities involved in conceptual blending. In a
simplest blend operation, there are three types of mental space:
·
Input space
·
Generic space
·
Blend space[5]
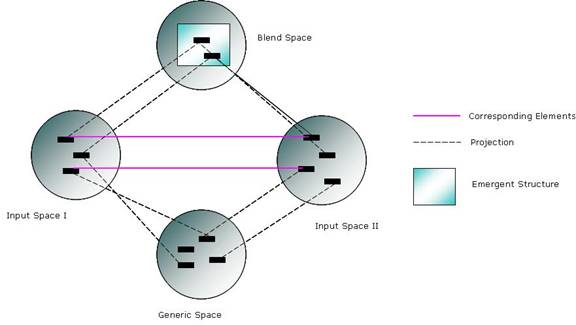
Figure 3.
Conceptual Blending (After [1])
Mental spaces are instantly built conceptual containers
that appear to be constructed as we talk, listen, remember, imagine and think [6].
Turner and Fauconnier name these containers as “conceptual packets”. Mental
spaces contain information about a particular domain. The elements of this
information represent entities of whatever we think or any activity we do. They
may be related to other elements inside other spaces and may be selectively
projected into a "blend space" as shown above. In Figure 3, mental
spaces are represented by circles, black rectangles represent elements, lines
between elements represent relations between elements, and dashed lines
represent projections from one mental space to another.
Blending is an inference method operating on spaces.
There may be more than two input space for a blend operation. Generic space
contains the common input elements of the input spaces as well as the general
rules and templates for the inputs. The elements of generic space can be mapped
onto input spaces. Blend space is the place where the emergent structure
occurs. The projected elements from each input space and generic space create
an emergent structure in the blend space, possibly something not in the input
space. The structure in the blend space may be an input for another blend
operation as controlled by an Integration network. A new emergent structure may
contain not only elements from the input spaces and generic space but also new
emergent elements that do not exist in either space [7].
Blending involves three operations:
·
Composition
·
Completion
·
Elaboration
Composition involves relating an element of one input
space to another. These relations are called “vital relations”. This matching
generally occurs under a "frame". Completion is pattern completion in
which generic space is involved in the blending operation. If the elements from
both input spaces match the information stored in the generic space, a more
sophisticated type of inference can be made, a generalization of reasoning by
analogy. This is the place where we use long-term memory and increase our
experiences. Elaboration is an operation that creates an emergent structure in
the blend space after composition and completion. It is also called running the
blend. [8]
“She was so sexy, but he’d heard she was a real cannibal”.
[9]
Considering the sentence above, the word
"cannibal" is metaphorical and has nothing to do with its original
meaning which is “An animal that eats the flesh of other animals of the same
kind”. [10] When we read this sentence, we can figure out that the woman who
was referenced is probably interested in the man’s money as opposed to his
flesh and most likely is using her beauty for this purpose. Disentangling such
metaphors and creating newly emergent structure is achieved by the elaboration
operation.
We may run blending operations many times for the same
input spaces. We cannot often reach a useful blend after one blend operation.
We do it subconsciously many times until we find the best result at the end.
There is always extensive unconscious work in meaning construction,
and blending is no different. We may take many parallel attempts to find
suitable projections, with only the accepted ones appearing in the final
network…. Input formation, projection, completion, and elaboration all go on at
the same time, and a lot of conceptual scaffolding goes up that we never see in
the final result. Brains always do a lot of work that gets thrown away [11]
Not all elements of the input spaces are projected into
blend space. This is called “selective projection”. This is vital to simplify
things. Let’s assume that we are looking at a radar scope, following air
contacts. There are two input spaces for that case: One for the aircraft values
and one for the air-defense concept. The aircraft input space has aircraft’s
properties including the kinematics, mission, nationality, type, color. The other
input space has the air-defense concept elements. At first we pay attention to
aircraft’s kinematics and other relevant factors. We never think about the
color of the aircraft even though it is an element of the input space.
Identifying the aircraft’s identity does only include other elements of input
space but not the color. Therefore the blend space which is the identity of the
aircraft does not include the color of the aircraft unless the context requires
it. The elements projected onto blend space are selected carefully based on the
context in which we are being viewed.
Figure 3 is an example of the simplest integration
network involving two input spaces, generic space, and blend space. The newly
emergent structure may be input space for a further blend operation and linked
to another network. A mental space that has been previously used in the network
may also be used again in the following blend operations. This gives the model
a coherent structure and the ability to explain experience in network form.

Figure 4.
Conceptual Integration Network
An integration network is the
focal point of the conceptual blending theory. This network consists of groups
of mental spaces and eventually constructs the meaning in our minds by way of
blending operations on mental spaces. “An integration network is an array of
mental spaces in which the processes of conceptual blending unfold”. [12] The
network is constructed by finding mappings between elements in different
spaces; projecting these relations from space to space and finally creating an
emergent structure that does not exist in either space.
Finding the relations between
spaces becomes the most important issue to construct identifiable types of
integration networks. At first it seems in Figure 3 that blend space is the
most important place of blending theory and therefore makes the blender the
most important module of the theory. Actually, this is not completely true. The
ability to find the relations between spaces is more important than modeling a
blender. These relations are called vital relations in blending theory.
These relations enable us to combine the two input spaces into one space that
is ultimately called compression. Turner and Fauconnier define two kinds
of relations in blending theory [13]:
·
Inner-space relations: relations inside the blend space
·
Outer-space relations: vital relations between the input mental
spaces
The newly emergent structure is constructed in blend
space by compressing outer-space relations into inner-space relations. Turner
and Fauconnier have listed vital relations as follows [14]:

These vital relations listed above are mostly used in
linguistics. However, we can define our own vital relations for an application.
Conceptual Blending Theory has four kinds of topology for its integration networks
of mental spaces [15]:
·
Simplex Network
·
Mirror Networks
·
Single-Scope Networks
·
Double-Scope Networks
The type of topology is primarily related to the
organizing frames. The similarity of the organizing frames in each input space
determines the type of the topology. Organizing frames may or may not be the
same for both input spaces. If they are not the same, clashes occur between
input spaces. One of the organizing frames or a hybrid of the two frames
determines the frame of the blend space.
Simplex networks have an "organizing frame" in
one input space and relevant data in the other input space. These networks are
good at variable-value type of relations. If we have a “track info” organizing
frame in one input, the speed, heading, location, identity and other variables
are represented by the elements in one input space. In the other input space
there are values for each element in the organizing frame. In Figure 5, input
space I has the data for the
speed variable for input space II.
Primarily in this kind of network role-value relations are used. Simplex
networks basically formalize first-order logic proofs as studied in artificial
intelligence.
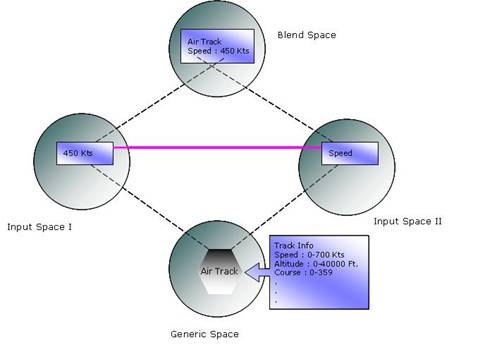
Figure 5.
Simplex Network (After [1])
In mirror networks, both of the mental spaces, generic
space and blend space, share the same organizing frame. Since both input spaces
share same organizing frame finding relations between inputs are
straightforward. Therefore there is no clash between mental spaces in the
blending at the level of organizing frame. However there may be clashes between
subframes of organizing frames. [16]
Turner and Fauconnier explain mirror networks with a
comparison of the cruise time of two sailing ships leaving San Francisco for Boston. In 1853 the clipper ship named Northern Light made this voyage in 76 days 8
hours and this was a record time until another modern catamaran named Great
America II made this distance in shorter time in 1993.
A few days before the catamaran reached the Boston, the observers were able to say that Great America II is 4.5 days ahead of Northern
Light [17].
This sentence discusses two boats racing with each other
and one of them is 4.5 days ahead of the other one. However, these two boats
are not competing with each other and they don’t even exist in the same time
period. When we read this sentence, we can understand that Northern Light was
in the analogous position in 1853 but 4.5 days later than Great America was.
One of the inputs to that blend operation is Northern Light cruising in 1853
and other one is Great America in 1993. The organizing frame in the blend
operation is sailing a boat from San Francisco to Boston. Only boats, time
periods and position on course are projected on to blend space while weather
conditions and the aim of voyage are not. Time vital relation enables us to
associate these two events in the same time domain by compressing time. Compression
is evaluating two events with 140 years time difference in the same space and
seeing them as if happening at the same time.
There is no clash between the organizing frames of these
two events. On the other hand, there are some clashes in the subframes. While
one input has a nineteenth century cargo sailing boat, the other input has a
twentieth century racing catamaran. Both frames clash each other but these
clashing properties are heuristically ignored in the blend. [18]
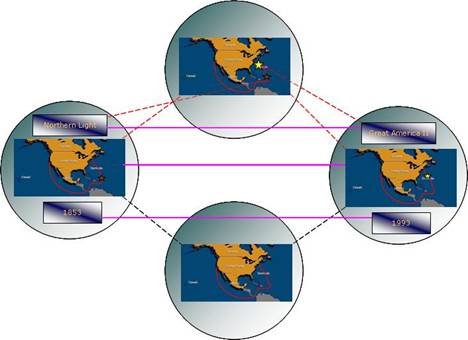
Figure 6.
Mirror Network (After [1])
Besides simplex and mirror networks, there are also
single-scope networks and double-scope networks in blending theory. In single-scope
networks the two input spaces have different kinds of organizing frames and
only one of them shows up on the blend space. In double-scope networks the
input spaces have two different organizing frames again but this time a
combination of these frames show up in the blend space.
The ADL Simulation uses only the simplex and mirror
networks. Simplex networks are used in assigning vales to variables of air
tracks. At the reactive level each reactive agent receives its information and
triggers another action at the predictor track-agent level.
Mirror networks are used in various places in the ADL
Simulation. They are used in "regional" space to figure out
coordinated activities between tracks. In a coordinated attack scenario, two
air tracks are turning inbound at the same time. Both of the input space
organizing frames are the same: Attacking a ship. We can compress these two
input spaces with the place and time vital relations and find a coordinated
attack profile and then project this conclusion onto blend space.
Another place that mirror networks are used in the ADL
Simulation is in the track-agent level. Consider an air track that is changing
its course. We can find out the change in course by comparing two heading
values in successive times. Two input spaces have two different heading values
in two different times. The organizing frames are same but the time elements of
the input spaces are different.
F. alternative ways to blending theory
and cmas library for adl simulation
Using the CMAS library is not the only way of
coordination and communication to implement ADL Simulation. An alternative to
usage of CMAS library is to pass arguments to each other and define methods for
each of communication links. This may be good for an environment where there
are many agents. In a mesh topology in where n agents have dedicated
point-to-point links to every other, we need n(n-1)/2 links. For a limited
number of agents in the environment this number may be acceptable but in ADL
Simulation’s layered structure there are more than 15 agents for each track.
For a multithreaded environment this number will multiply itself for dedicated
links between every agent. The requirement of links and coordination between
each agent could be a considerable advantage of the usage of the CMAS library.
Therefore we used CMAS library for coordination and communication between
agents instead of using a mesh topology and dedicated link between each agent.
THIS PAGE INTENTIONALLY LEFT BLANK
iII. RELATED
WORK IN NAVAL AIR-THREAT ASSESSMENT
We reviewed a variety of previous work that relates to
the subject of naval air-defense, cognitive modeling, threat assessment and how
the human brain works. Many studies were conducted after the USS Vincennes and
the USS Stark incidents to understand the underlying reasons and the
factors affecting decision-making under stress. While most studies focused on
increasing the accuracy of decisions made under stress and the performance of
watchstanders in the Combat Information Center on board ships, there has not
been much study on a cognitive model for the human contribution to decisionmaking.
A few studies of how humans do identification and threat assessment suggests
that humans get inputs from environment, compare them with some predefined
templates, and then make a decision.
A plan recognition system for airborne threats was
developed by Richard Amori, the Plan Recognition for Airborne Threats (PRAT).[19]
PRAT performs three-dimensional spatial and temporal reasoning, incorporating a
high volume of data with predefined patterns via two different kinds of agents.
The PRAT system used the Falkland war between Argentina and Great Britain in its scenarios.
The most important module of the system is the Plan
Recognizer which is an intelligent subsystem. This module is based on physical
data and changes to this data, known air tactics and behaviors, and likely
primary and secondary goals. This module has two subcomponents: the
Individual-Agent Manager and Sets-of-Agents Manager. The former analyzes the
data associated with each track while the latter analyzes the coordinated
activity between air threats. These two modules use each other’s inferences so
that both can provide mutual support for more accurate reasoning. Each of these
modules uses "rolling" data structures that evolve and are updated
continuously. Each data structure has forward and backward components. A
backward component is supplied with incoming data from the environment while a
forward component provides the reasoning about the track or tracks. “A backward component permits reasoning which is
historical in nature, and the forward component permits reasoning which is
hypothetical in nature”. [19]
In naval air warfare, a large amount of data needs to be
processed. In high-threat situations this becomes even more severe. The PRAT
system addresses this problem by dividing responsibilities into sets of agents.
Each module is also subdivided into several different mission reasoners.
The PRAT system is similar to the ADL Simulation in two
ways. First, both use a layered agent architecture rather than using one type
of agent. Secondly, both use some common factors to identify track intention
and identity like kinematics values. One difference between ADL Simulation and
PRAT system is that the PRAT system uses only kinematics values while the ADL
Simulation uses additional factors. The ADL Simulation also uses special CMAS data
structures instead of keeping data in a data structure and traversing this data
each time to find a match or reason about existing history data as in the case
of PRAT.
Another investigation examined the cognitive aspects of naval
air-threat Assessment. Experienced US Navy Air-defense personnel were used in
this research. Collected data revealed that participants assigned threat and
priority levels to air tracks by using a set of factors.
Factors are elements of data and information that are
used to assess air contacts. Traditionally, they are derived from kinematics,
tactical, and other data. Examples of such data include course, speed, IFF
modes, and type of radar emitter. [20]
The major factors were
electromagnetic signal emissions, course, speed, and altitude, point of origin,
Identification Friend or Foe (IFF) values, intelligence, airlane, and distance
from the detector. Participants used up to 22 factors, and each used different
but overlapping factors. Participants used more factors in identifying tracks
posing a greater threat than tracks posing a lesser threat. Participants used
the factors in a certain order in threat assessment and each factor had a
priority.
Each factor has an expected range of values. Research
showed that aircraft that matched these expectations were assigned lower threat
levels than aircraft that did not. Figure 7
shows a threat assessment model derived from the research.
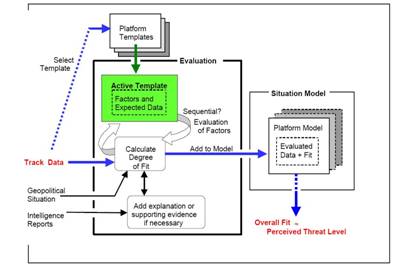
Figure 7.
Cognitively-Based Model of Threat Assessment (From [20])
The ADL Simulation uses the factors found in this
research in its reactive agents in the threat assessment process. The ADL
Simulation improved on this model by adding an integration network and the
ability to evaluate coordinated activities between two or more aircraft.
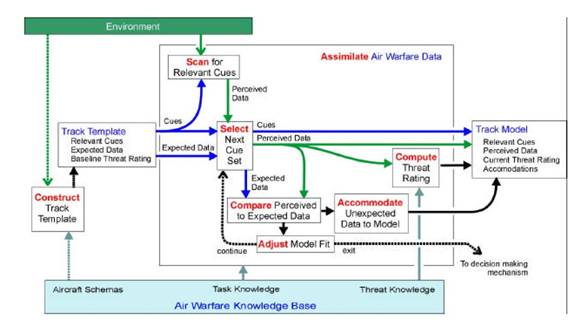
Figure 8.
Threat Assessment Model (From [22])
The factors in the previous model are mentioned as cues
in another study. Each cue has a weight and if the perceived data is
unexpected, the value of the active model is reduced by the weight of the clue.
Other studies discussed in this paper includes Tactical Decision Making Under
Stress (TADMUS), the Decision Support System (DSS), and the Basis For
Assessment (BFA) concerning the development of more efficient tactical displays
and human interfaces for air-defense personnel. These studies showed that if
the most important data is shown to the user more effectively, accuracy is
increased in threat assessment.
The following results were found in the research:
·
Users created templates to define
which cues will be evaluated and the permissible range of data for each cue.
·
Cues were:
·
Evaluated in a fairly consistent
order;
·
Weighted;
·
Processed in sets reflecting their
weights.
·
Air-defense threat evaluators:
·
Did not rely on all data, only the
data associated with cues in their active template;
·
Did not change templates in the
face of conflicting data;
·
Were influenced by conflicting
data in specific cues rather than in the overall pattern.
·
Perceived threat level:
·
Was related to the degree of fit
of observed data to expected data ranges in the evaluator’s active template;
·
Was not related to the number of
cues that were evaluated during threat assessment [23].
E.
Simulation of an Aegis Cruiser Combat Information Center
Other previous work reports on a simulation that models the
CIC of an Aegis Cruiser for air defense. The research mainly explores the
team’s performance under high-stress situations and tries to understand the interpersonal
factors that affect the overall performance of the CIC team and watchstanders.
Air-defense contact identification, threat assessment, and classification were
modeled but were not the primary focus of the research. An artificial neuron is
used to model the cognitive decision-making process.

Figure 9.
Contact Classification Artificial Neuron (From [24])
Each contact category has a threshold value for
classification and threat level. The threat level may be White, Yellow or Red.
Each input value has a weight and weighted sum is compared to a threshold. The
scoring values and thresholds were constructed in compliance with air-defense
personnel from the ATRC detachment in San Diego, CA. The threshold values are
displayed below:
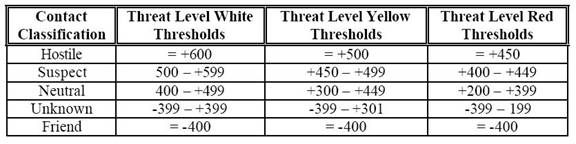
Table 1.
Default Classification Threshold Values(From [24])
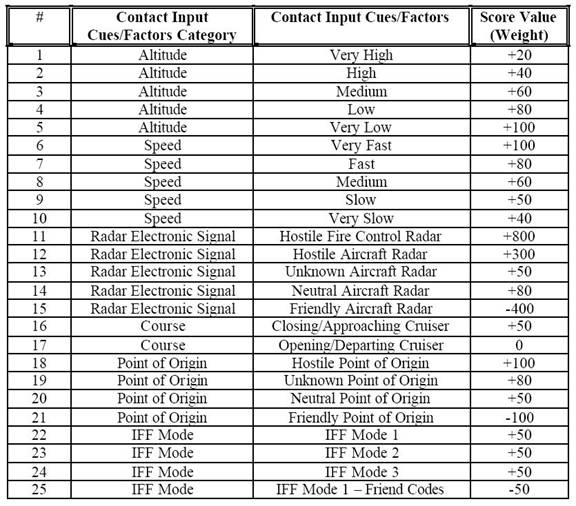
Table 2.
Scoring (Weighted) Values for Various Input Cues(From [24])
Another relevant study discusses data-fusion techniques,
collecting data from multiple sources and combining them to achieve more
accurate results than could be achieved from a single sensor alone. Data fusion
has military applications (e.g. finding track identity and establishing a
tactical picture) and non-military applications (e.g. robotics, automated
control of smart buildings, weather monitoring, and medical applications). Air-threat
assessment involves data fusion since air-defense personnel have to combine
information from multiple sensors and evaluate them.
To establish target identity, a transformation must be
made between observed target attributes and a labeled identity. Methods for
identity estimation involve pattern recognition techniques based on clustering
algorithms, neural networks, or decision-based methods such as Bayesian
inference, Dempster-Shafer’s method, or weighted decision techniques. Finally,
the interpretation of the target’s intent entails automated reasoning using
implicit information, via knowledge-based methods such as rule-based reasoning
systems [25].
The fusion in the ADL Simulation used a combination of
a neural network in the form of an integration network and an evidence
weighting algorithm. An integration network is used by the Conceptual Blending
Theory. The models that reside in the nodes of this network are weighted based
on some Bayesian inferences.
This study also suggests Blackboard Knowledge-Based
Systems (KBS) as a good data-fusion method. These systems partition the problem
into subproblems and use constrained interaction between solutions of
subproblems to solve whole problem. This is analogous to how human experts come
to a solution by gathering in front of a blackboard and brainstorming. A KBS
must have three required elements:
a. Knowledge
representation schemas
b. An
automated inference/evaluation process
c. Control
schemas
The first and third requirements are provided by Generic
Space while the second requirement is done by the blender in Conceptual
Blending Theory. Thus the method used in ADL Simulation (Conceptual Blending
Theory) fulfills the requirements of a KBS. At the same time, the ADL
Simulation is a cognitive model for how humans accomplish these functions.
Another study about multi-sensor data fusion
distinguishes three kinds of data fusion: data, feature, and decision. For data
fusion, raw data from each sensor is combined in a centralized manner. This is
claimed to compute the most accurately of the three. The drawback of this
method is the requirement that all sensor values must be put in the same units.
If sensors are distributed in the real world, all the information from all of
the sensors must be transmitted to the center, which requires a large bandwidth.
In feature-level fusion, features are extracted in each sensor and these
features are transmitted to the center. In this case communication requirements
are reduced but the result is less accurate because of the lost information
during generating features from raw data. Finally, in decision-level fusion,
each sensor sends a decision about its input and these decisions are fused. The
result is the least accurate of the three fusion options because of the
information compression of the sensor observations, but requires the least
bandwidth.
In ADL Simulation, predictor track agents are like local
sensors focused on individual aircraft tracks. They are using feature-level
fusion in which sensors are represented as reactive agents. Predictor agents
thus infer the identity of the aircraft based on the features sent by the reactive
agents. At the same time, regional agents identify coordinated activities
between aircraft and collect data from track agents, doing something like
decision fusion. Thus, different levels of data fusion are used in the ADL
Simulation.
In summary, the ADL Simulation is unique for the
following reasons:
·
It uses Conceptual Blending Theory to imitate a human brain.
·
ADL Simulation uses a Connector Based Multi-Agent System to
create an integration network.
·
The ADL Simulation allows a user to set up an arbitrary
geographical area to test.
·
It is structured with a layered design.
·
The ADL Simulation can use both analog and digital approaches to inference
to permit studying the precision losses that come with digitization.
·
Its results are stored in an XML file which enables studying this
data.
·
It allows a user to see the decisionmaking process in a
step-by-step manner and give reasons for decisions. A user may see all
decision-making processes by sending queries to a track.
The ADL Simulation is written in the Java programming
language. It was developed using the JBuilder 9 Application Development
Environment. The Java Development Kit 1.4.1_02 is used for the implementation
of the program. The program was run on a Pentium 4, 2.4 GHz. machine with 512 megabytes
(MB) of RAM. The requirements to run the program are as follows:
·
Pentium 3 or equivalent and higher processor
·
Minimum 512 MB of RAM
·
Java Development Kit 1.4.1 or higher
·
Screen display of 1280x1024 pixels or higher
The program is based on a multi-threaded environment:
There are more than 100 threads running in a five-track scenario. Therefore a
processor with high speed and large amount of RAM is a requirement for the
program to run smoothly. The SPY XML Editor was used to monitor data logging
information and XSLT transformations. XML files are used to store data logging
information.
A multi-agent system (MAS) is a computing model made of
entities that communicate with each other and act in an environment. [2] Agents
are autonomous software elements operating in an environment. Multi-agent
systems have six components: an environment (E) which is the space where agents
operate, the objects (O) in the environment, actors (A), relations (R) between
actors and the environment and relations between agents, operations (Ops) that
are executed by actors, and laws of the environment.
Agents in a multi-agent system environment receive input
from the environment, process this input, and produce an output. Then the
agents release the output back to the environment. This kind of architecture
may be basically formulated as sense-process-act.
According to Integrated Asymmetric Goal Organization
(IAGO) team at NPS there are three kinds of agents: reactive, cognitive, and
composite. The actions taken by reactive agents only rely on the current input
data, and these agents do not use memory or experience. Therefore there is no
learning capability in reactive agents. They are good at basic implementations
(e.g. thermostats or alarms).
Cognitive agents maintain a state of information and
knowledge which permits them to operate in conjunction with the memories and
experience gained so far. Composite agents are composed of both reactive
agents and cognitive agents, typically in a hierarchy. Such agents communicate
with the inner environment of the host agent as well as the outer environment.
Inner agents maintain an insight model and internal states for host agent.
An alternative taxonomy gives four kinds of agents: simple
reflex, environment trackers, goal-based, and utility-based. Simple reflex
agents are associated with the definition of reactive agents. Agents that keep
track of the environment have some sort of state information but they are not
quite cognitive enough. Goal-based agents address certain kinds of goals.
Utility-based agents try to make agents happy on the way to the goal. While
goal-based agents use only one path to a goal, utility-based agents use the
most effective path.
Connectors are one way to do communication and
coordination between agents. They are a particular kind of message passing
system. [26][27] Only the agents with the same namespace of the source agent
may receive the data through the connectors. Naming the connectors with a
namespace provides an addressing facility in the communication between agents.
There are three different states for a connector: retracted, extended, and
matched.
Retracted connectors are the ones that are not broadcast
by agents. They cannot be matched to another agent. Such a connector may be
retracted because the connector could not match in a certain time, the
conditions that created the connector have changed, or the conditions have not
yet been met to extend the connector. In an extended connector, the inner state
information is made available to the outside environment for another agent with
the same kind of connector to match. Matching connectors may fire an action or
change the state of a data structure in an agent.
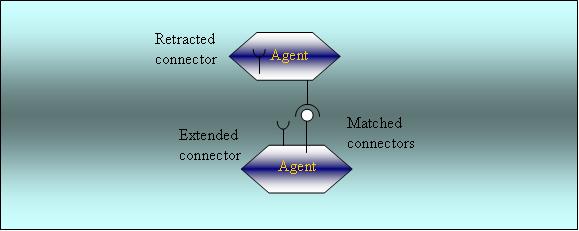
Figure 10.
Connector States
One could question that there are other many ways
proposed for agents to communicate. A general message passing could be used to
communicate the agents. During the research before we received the library we
used a general message passing method. As the project got bigger the amount of
code also increased. After we received the CMAS library, we used connectors to
communicate and coordinate the agents inside the simulation. With the CMAS
library, we decreased the amount of code for coordination and communication of
agents. This enabled us to focus on the model rather than the coordination of
agents. For our second goal, use of the CMAS library enables us to extend the
project further in the future.
Tickets are procedural instructions for agents and data
organizing systems. There are basically two kinds of tickets: data and
procedural. Data tickets organize the data structures inside an agent. These
tickets have different kinds of frames. These frames may include names, types,
and type-value pairs. The status of a ticket is determined by the status of
each frame inside the ticket. Data tickets may be used as a trigger to fire an
action when a set of data is matched with predefined criteria. Procedural
tickets have methods to be executed. When certain conditions are met the
methods in these frames are executed in the ticket.
Both data tickets and procedural tickets have two states:
completed and incomplete. A data ticket may be completed when either all of the
frames in the ticket are “set” or a predefined subset of all frames is “set”.
Procedural tickets may be completed when either all of the frames are executed
or a subset of them is executed. The frames that have to be set or executed to
make a ticket complete are called primary frames.
A ticket may also be sequential or non-sequential.
Sequential ticket frames must be completed in sequence while frames may be
executed or set out of order in a non-sequential ticket. In a sequential
ticket, each frame may set or fire the other frame to set or execute. The
tickets in which the all frames have to be set or executed without interruption
are called synchronous tickets, or must-complete tickets. Tickets in which the
frames may be set or executed in any time are called asynchronous tickets.
There are other ways to associate procedural and logical
information with an agent. Plans, rules, and scripts are some of them. The
difference between them and tickets are that tickets are more abstract. We can
do more things with tickets. Tickets retain the plans, scripts, rules, and data
structure of an agent. Most of the implementation of tickets in CMAS library is
interfaces not classes. Tickets of the library are left to user to be
implemented based on the context.
Tickets and connectors may be used together to achieve
various kinds of design options and complete coordination between agents.
Connectors may be used to activate a ticket. This kind of relation may be a
precondition for the ticket. After some certain conditions are provided tickets
are activated and the frames in the ticket are executed.
Connectors may be used as a trigger for methods
implemented in procedural tickets or to set data structures in data tickets.
Then connectors are gates to individual frames inside the ticket. Once a
connector is matched with another one, methods in frames in a ticket may be
fired. In that sense connector matching acts like a function call. An action
taken by a frame inside a ticket may be a trigger for a different frame inside
another ticket. Then output which is released from a frame of a ticket may be
connected to an additional frame inside another ticket.
Many MASs are nested agent systems. At the very bottom
level, reactive agents are the working units. Above them is there another agent
system with more cognitive agents and so forth. Each agent system makes their
own decisions in their local area called a "membrane" or context. The
relations with upper and lower level membranes are provided by connectors.
These connectors enable systems to be generalized. With generalization, agent
systems can not only affect their little environment but also affect the
outside environments and receive information from outside world. This is called
feedback.
CMAS library was written by Neal Elzanga for the IAGO at the
Naval Postgraduate School. This library enables users to define five types of
connectors: String, Integer, Double, Float, and Boolean connectors. Each
connector must be given a namespace to enable matches in the CMAS library.
These namespaces stands for membrane. If the connectors are registered to CMAS
library, any query with registered namespace in the software can reach the
value of the connector if the connector status is extended. That enables the
user to communicate the agents between each other without implementing an
external connection inside the software. CMAS library also enables the user to
define tickets. Both data and procedural tickets are implemented in the CMAS
library. The library and IAGO project is still on progress at Naval Postgraduate School.
The ADL Simulation user interface has four main
components as shown in Figure 11: menu options, output panel, toolbar, and
tactical display.
The tactical figure has four drop-down menus. These menu
options allow a user to specify the environment, create and delete airbases,
air routes, and joint points, create user-derived aircraft, load a pre-prepared
scenario, save a prepared scenario, and create an Air Tasking Order (ATO)
message for friendly activity in the environment. ATO Messages are prepared by
the Air Force or Naval Force holding air assets in their force on daily basis,
and this message informs all friendly forces of the friendly air activity in
the area with time frame, task area, IFF values and mission specifications.
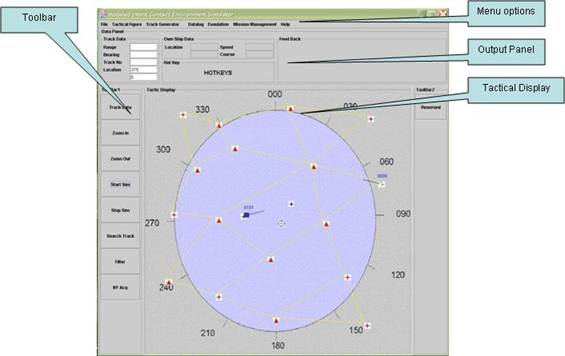
Figure 11.
Visual Design of the ADL Simulation
One submenu opens a new window for the user to define the
tactical scenario for the simulation. The user can create an environment by adding
airports, joint points, and air routes between these points (Figure 12). The
simulation finds the shortest path from each airport to every possible airport
and stores them as waypoints. The method used to find the shortest route is a
combination of the A* and Depth First Search (DFS).
The user can also create a track by specifying the
waypoints on this panel. The user can specify the altitude, speed, IFF
Transponder status, IFF values, radar status, and radar emission on this panel.
Agents controlling the actions of the aircraft adjust the altitude and speed of
the aircraft based on the values on the waypoints. IFF and radar status changes
on the waypoints are based on the geographic location of the aircraft.
Another menu option loads the default scenario from the
hard disk. This scenario includes the location of airports, joint points and
the routes connecting them. This enables the user to test the same scenario
multiple times without recreating the same environment. The user can also
create an ATO message.
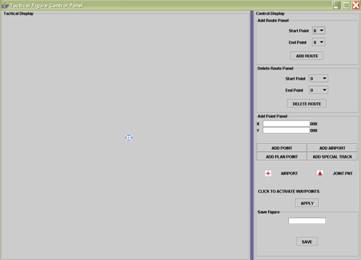
Figure 12.
Tactical Figure Control Panel
There are four submenus under the Track Generator:
Generate Tracks, Add Coordinated Attack with Snooper, Add Coordinated
Detachment Attack, and Add Missile Attack. The user can define the maximum
number of randomly generated tracks in the environment. User derived tracks,
the snooper, coordinated detachment attack track, and missile attack track are
not included in this number. The user can also define the percentages of the
types of aircraft on this panel.
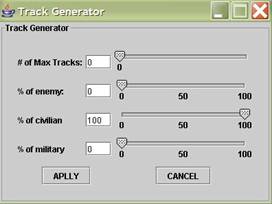
Figure 13.
Track Generator Panel
The snooper is an opponent aircraft charged with
collecting intelligence in a given area. These aircraft orbit at a specific
location and they stay out of effective weapon range of the ships to protect
themselves from surface engagements. They pinpoint the location of surface
contacts for striker aircraft. The snooper track is an actor of one of the
coordinated attack scenarios of the simulation. The location and behavior
information of the snooper is loaded into the simulation when this particular
option is selected.
An enemy aircraft can also be created in an expected
threat sector. When the distance is about 30 nm, this track is split and
another track shows up on the screen. They change their direction 20° away from
the initial course but each one in a different direction. When the surface ship
is on their beam, both aircraft return inbound and attack the ship. After the
engagement is completed both tracks fly away from the ship and merge again. The
scenario figure is shown below.
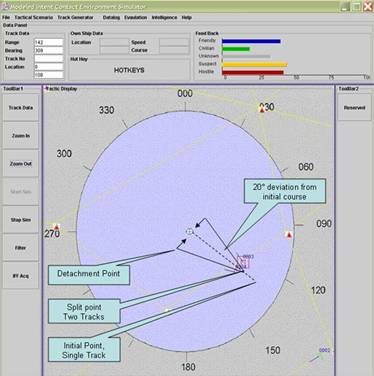
Figure 14.
Coordinated Detachment Attack
An enemy aircraft loaded with Air-to-Surface Missile
(ASM) can be created in the expected-threat sector. It directly approaches
ships until its range is about 30 nm. Then the aircraft releases its missile
and turns away from the ship. This action is simulated in the ADL Simulation by
splitting the air track.
The user can choose to turn the datalog option on or off
and define the datalog frequency to store track agent information to an XML
file. The ADL Simulation periodically stores all the information to an XML file
if the datalog is turned on. The Analog & Digital selection panel enables
the user to select the criteria for the evaluation process at the
predictor-agent level and reactive-agent levels
The evaluation of model panel shows the integration
network created by the ADL Simulation for the regional agent and the selected
track. The integration network is represented in a tree structure. The user can
traverse on the tree and see the steps of decisionmaking process. Each node of
the tree represents a mental space defined in the blending theory. The user can
see the compression of blending theory by expanding the tree downward.
The user can also set the threshold values for speed,
CPA, and the range evaluation process under a menu option. These values are
used when digital evaluation is selected on the Analog & Digital Selection Panel.
These values are used when digital evaluation is selected on the Analog &
Digital Selection Panel.
The ADL Simulation can be used either in user mode or
model mode. When user mode is selected, the identities of the tracks are
changed by the user. We defined this mode for testing the simulation. This mode
can also be extended to perform training of air-defense personnel. In this mode
the competing models feedback panel does not show the weights of the competing
models. When the model mode is selected the identities of the tracks in the
simulation is changed by the model.
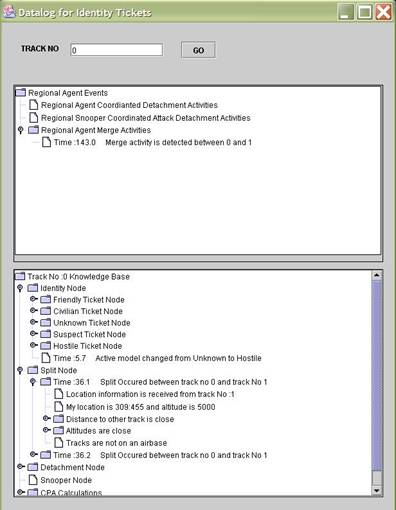
Figure 15.
Evaluation of Model Panel
There are two submenus under the Intelligence menu: Setup
IFF and Setup Threat Intelligence. IFF is used as an electronic identification
method to identify air assets. IFF-1 values show the mission type of the
aircraft. IFF-2 values are used to specify the aircraft identification number. IFF-3
values are used by both civilian and military aircraft to identify which Air
Traffic Control Unit is controlling the aircraft. The user can choose to load
default values. The user can define the threat expected sectors in the
simulation via the Threat Intelligence Panel. This information plays a key role
in the identification process.
A track can be selected by clicking on it. Once the track
is selected a red square is drawn around it. The selected track’s location,
bearing, and range values can be observed on the Selected Track Information in
the output panel. The “Track Data” button in the tool bar at the left side of
the tactical display opens another track data frame.
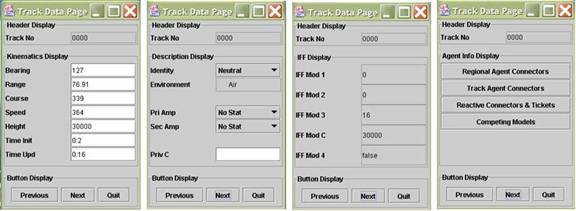
Figure 16.
Track Info pages
The track Info frame has four pages presenting sequentially
kinematics, description, IFF, and agent info displays. The Description display is
prepared for the user mode of the simulation. The user can change and add additional
identity information of the track. The agent info page has access to four different
frames: Regional agent connectors, track agent connectors, reactive agent
connector and track agent tickets and finally competing models.
The regional agent connectors frame shows all the
extended connectors, extended queries, and matched connectors of regional agents.
The user can see the insight of the blending operation of the ADL Simulation at
the regional agent level by traversing the data stored in this frame. Other
frames show all the extended connectors extended queries and matched connectors
of individual track agent and reactive agents. The user can see the current
status of the identity tickets and ATO ticket on the menu selection of the reactive
agent connectors panel.
Figure 17.
Regional Agent and Track Agent Connectors Frames
The weight of each identity ticket can be observed on
the Competing Models Frame. Each identity’s weight is drawn by a figure with
different colors. User can also zoom in and out during the simulation. There
are four scales in the simulation.
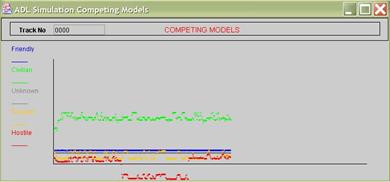
Figure 18.
Competing Models Frame
The Simulation starts by creating the tracks based on the
numbers entered in the Track generator panel. These tracks randomly pop up on
the screen. The simulation may be paused by the pause button. Pause button puts
all threads working in the simulator in sleep mode.
The output panel has three subpanels: the data panel, the
selected track panel, and the competing-models feedback panel. The data panel
presents the location, range and bearing of the mouse on the tactical display.
This panel also allows the user to enter a track number to set it as the
selected track. After a track is selected by clicking on it or entering the
track number into the Track Number field in the data panel, its location,
bearing, and range values can be observed on the selected track subpanel. The
competing-models feedback panel shows the current weight of all competing
models.
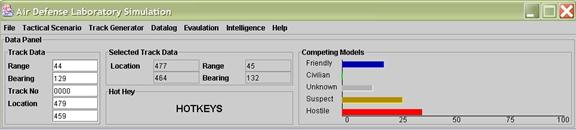
Figure 19.
Simulation Output Panel
We integrated java and XML with JDOM beta9. JDOM is an
open source API enabling writing, reading, and manipulating of XML files inside
Java code. JDOM is not the only API available for Java-XML integration; there
are DOM and SAX available for integration. We chose JDOM because it was simple
to use and the JDOM API methods are following the same philosophy of existing
Java API. It combines the advantages of two other API. JDOM is compatible with
the classes of Java API. It is using the Collection class of Java API. The only
drawback of JDOM is that JDOM is limited to Java. It is not a platform free API
like DOM and SAX.
THIS PAGE INTENTIONALLY LEFT BLANK
There are two types of track agents in the ADL
Simulation: Real track agents (modeling aircraft) and predictor track agents
(modeling air-defense personnel). Real track agents have full control of the
behaviors of the air tracks. They determine the actions that the aircraft will
take. They have full access to track information and can modify them. Predictor
track agents only can change the predicted identity value of the aircraft. They
cannot change any other variable of the tracks. Predictor agents also can only
receive the kinematics values of aircraft (location, speed, heading etc.), IFF
values that the aircraft responds to interrogations, ESM values received from
the aircraft, and intelligence information.
Predictor agents are designed in a layered structure to
enable ease of implementation, to include every possible detail and to be able
to use the membrane property of CMAS library. The membranes allow agents to
operate in separate environments. There are three layers in the ADL Simulation:
the regional-agent layer, the track-agent layer, and the reactive-agent layer.
While there is one track agent and reactive agent for each track in the
environment, there is only one regional agent for all tracks.
Real track agents determine what actions that the
aircraft will take at a specific location and time. Some of the decisions are
determining the next waypoint, determining the point to turn, increasing or
decreasing the speed and altitude, turning on/off the radar and IFF
transponder, and commencing attack. There are seven main types of real track
agents. The details of the implementation of the behaviors of the aircraft is
based on our experience, tactical procedure publications, and air warfare game
documents
The civilian aircraft track agents’ mission is to take
off from an airport and follow air routes to the destination airport. Takeoff
and destination airports are picked randomly. Typical values for a civilian
aircraft are shown below.
|
Attribute
|
Behavior
|
|
Takeoff and destination airbases
|
Randomly
chosen
|
|
Speed
|
Initial
: 100
Max Speed: 400 + random number (1-75)
|
|
Max Acceleration
|
10-12
|
|
Altitude
|
Max
30000 Ft.
|
|
IFF-2
|
0
|
|
IFF-2
|
0
|
|
IFF-3
|
Random
number (1-9999)
|
|
IFF-4
|
False
|
|
Radar Status
|
On
|
|
Radar Emission
|
Civilian
Radar Emission
|
|
Turning angle
|
2°
|
|
IFF Transponder status
|
On
|
Table 3.
Civilian Aircraft Attributes and Behaviors
A civilian track agent finds its waypoints by using a
combination of A* search and Depth First Search (DFS). At each step, the track
agent measures the distance to the next waypoint and determines the course to
reach the next waypoint. When the aircraft comes to the turning point, it turns
to a new waypoint with its turning angle. The turning angle is the amount the
aircraft in one tenth of a second. Based on the speed and course, new location
points are calculated and track position is set to these points. On the last
waypoint the aircraft starts decreasing altitude and speed, and subsequently
finishes its mission by landing at the destination airport.
The friendly aircraft's mission is to fulfill a randomly
chosen task. There are ten friendly tasks. Every friendly mission must be
defined by an Air Tasking Order message. If no task is defined in such a
message by the user, a randomly generated task is generated by the simulation
and inserted in the message. The friendly tasks are as follows:
|
Task
|
Behavior
|
|
OCA
Sweep
|
An
Offensive Counter Air sweep mission is an Air-to-Air mission and its intent
is to shoot down enemy aircraft.
|
|
RECON
|
A
Reconnaissance mission’s intent is to take pictures in a given area or on a
path.
|
|
CAS
|
A
Close Air Support mission supports the army in ground attack missions.
|
|
BARCAP
|
A
Barrier Combat Air Patrol mission’s intent is to protect a given area from
enemy attacks.
|
|
Deep
|
A
Deep mission’s intent is to attack enemy units in enemy territories.
|
|
OCA
|
An
Offensive Counter Air mission’s intent is to attack enemy airfields.
|
|
BDA
|
A
Battle Damage Assessment mission’s is to check the target status after the
attack is completed.
|
|
SEAD
|
A
Suppression of Enemy Air Defense mission’s intent is to attack enemy
air-defense units such as SAM launchers.
|
|
DCA
|
A
Defensive Counter Air mission’s intent is to protect AWACS or a High Value
Unit (HVU) from enemy attacks.
|
|
ESCORT
|
An
Escort mission’s intent is to protect a given unit from enemy attacks.
|
Table 4.
Friendly Aircraft Missions [28]
The OCA Sweep and RECON missions are path missions. They
have certain waypoints randomly chosen by the track agent. Other missions are
area missions: Aircraft are given a certain area to stay inside during the task
period. We did not implement the detailed specification of each task. From the
point of view of an air-defense officer, an aircraft’s activity is less
important once its identity is known. For that reason we divided the missions
into path-based missions and area-based missions. The real track agent’s
mission is to make sure that aircraft are following the path or staying inside
the area based on the mission type.
|
Attribute
|
Behavior
|
|
Mission
|
Randomly
chosen
|
|
Speed
|
Initial
: 100
Max Speed: 500 + random number (1-100)
|
|
Max Acceleration
|
10-17
|
|
Altitude
|
Based
on mission. Around 20000 Ft.
|
|
IFF-1
|
Determined
by ATO message
|
|
IFF-2
|
Determined
by ATO message
|
|
IFF-3
|
Determined
by ATO message
|
|
IFF-4
|
True
|
|
Radar Status
|
On
|
|
Radar Emission
|
Military
Radar Emission
|
|
Turning angle
|
4°
|
|
IFF Transponder status
|
On
|
|
Origin
|
Safe
sector
|
Table 5.
Friendly Aircraft Attributes and Behaviors
Every friendly activity originates from a friendly
country and their IFF-4 value is true with very high probability. When the
mission is completed, the real track agent sends the aircraft toward the
friendly country and it leaves the radar scope.
An enemy aircraft track agent randomly picks one of the
enemy missions and executes the requirements of this task. All of the enemy
aircraft take off from the "threat expected" sector except for the
aircraft that have chosen a terrorist attack mission. If there is no
threat-expected sector defined in the simulation, the attack origin is selected
randomly. These aircraft use randomly picked IFF-1, 2, and 3 settings. The
IFF-4 value is false for enemy aircraft with very high probability. The enemy
missions are:
|
Task
|
Behavior
|
|
HADB
Attack
|
High
Altitude Dive Bomb attack
|
|
DB
Attack
|
Dive
Bomb attack
|
|
Popup
Attack
|
Low
attack profile
|
|
Terrorist
Attack
|
Specialized
terrorist attack profile with a civilian aircraft
|
Table 6.
Enemy Aircraft
Missions [28]
An HADB attack is a medium attack profile. Aircraft begin
to attack at 22,000 ft. and fly towards the ship. When the distance is 15 nm,
the aircraft makes a 15° turn. When the ship is about 60-90° relative bearing
from the ship’s heading, the aircraft turns inbound and executes the attack on
the ship. A DB attack is another medium altitude attack but it starts at an
altitude of 10,000 ft. A pop-up attack is a low altitude attack. The aircraft
approaches the ship at a low altitude and flies towards the ship until the
range is 7 nm. At a 7 nm distance to the ship, the aircraft makes a 30° turn
away from the ship. When the ship is at 30° relative bearing from the aircraft
heading, the aircraft pulls up and increases its altitude. At 5000 ft. the
aircraft turns inbound and starts decreasing its altitude and executes the
attack. [28]
In a terrorist attack scenario, the enemy aircraft
behaves like a civilian aircraft. It takes off from a randomly picked airport
and its destination is another randomly picked airport. This scenario is
prepared to suggest a terrorist attack like those of September 11, 2001.
During its flight, the real track agent calculates the nearest point to the
ship on the air route. At this point the aircraft suddenly turns inbound and
decrease its altitude. This action gives the predictor agents a short reaction
time to identify the aircraft’s behavior. Terrorist attack specifications are otherwise
the same as civilian aircraft. The enemy military aircraft specifications,
except for terrorist attack missions, are as follows.
|
Attribute
|
Behavior
|
|
Mission
|
Randomly
chosen
|
|
Speed
|
Initial
: 100
Max Speed: 500 + random number (1-100)
|
|
Max Acceleration
|
10-17
|
|
Altitude
|
Based
on mission. Around 20000 Ft.
|
|
IFF-1
|
Randomly
chosen
|
|
IFF-2
|
Randomly
chosen
|
|
IFF-3
|
Randomly
chosen
|
|
IFF-4
|
False
|
|
Radar Status
|
On
|
|
Radar Emission
|
Military
Radar Emission
|
|
Turning angle
|
4°
|
|
IFF Transponder status
|
On
|
|
Origin
|
Threat-expected
sector
|
Table 7.
Enemy Aircraft Attributes and Behaviors
The coordinated detachment attack track agent executes a
coordinated attack on a ship. It was developed to test the coordinated activity
detection of the regional agent. This agent handles three activities:
detachment, split, and merges. At first only one aircraft is detected on the
radar screen. Actually there are two aircraft but since they are so close to
each other and the range is so long, the radar sense only one track. When the
aircraft comes to about 30 nm, the track splits and another air track shows up
on the screen. At this point, another enemy real track agent is created by the
coordinated detachment attack track agent, but the control of the second enemy
aircraft is under the first one. The first aircraft behaves as a wing commander
in this scenario. When the aircraft split they detach from each other and fly
20° away from the previous
course in different directions. The reason for this detachment is to prevent
weapons coordination of the ship for self defense against the attack. When they
are detached, the ship has to allocate different weapons and track radars for
each of the aircraft. When the aircraft see the ship at their beam, they
suddenly turn inbound and attack. This is called a coordinated attack. On top
of the ship, the two aircraft merge and split again when they complete the
attack. About 20 nm away from the ship these two aircraft merge once again and
leave the area.
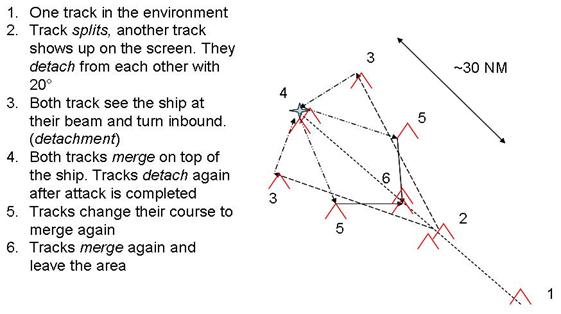
Figure 20.
Coordinated Detachment Attack
Profile
Air-to-Surface missiles (ASM) are the most dangerous
airborne threat to a ship. They are fast, small, and difficult to detect and
destroy. Additionally, they can be smart to avoid some of the Anti-Ship Missile
Defense (ASMD) reactions of ship and they are high damage-capable. They can be
released from an aircraft at about 40 nm away from the ship. This may make the
ship’s proactive reaction plan useless because they may not destroy the missile
platform before the missiles are released because the platform is out of the
effective weapon range of the ship.
The ADL Simulation has a special kind of agent to
simulate the missile attack scenario. The missile attack track agent’s mission
is to lead the aircraft toward the ship and release its missile about 40 nm
away from the ship. Then they turn away and leave the area. At the missile
release point another track shows up on the radar screen, and is controlled by
the missile track agent.
The Missile track agent controls the missile track
actions. We defined two types of missile profiles in the ADL Simulation. One of
them is a sea-skimming attack missile and one is a pop-up attack missile
profile. The sea-skimming missile flies just over the sea with an 80ft
altitude. This prevents ship sensors from easily detecting and destroying it.
The pop-up missile increases altitude suddenly at close range to the ship and
then dives into ship. The reason is to drop explosive materials in the warhead
of missile onto the ship to damage the ship’s sensor and weapon systems even if
the missile is shot by the ship’s self-defense systems. Missile track agents
randomly pick one of these two modes when the track is created.
We provided a user-derived track capability to the ADL
Simulation to add diversity of tracks. The user can define the track and
behaviors on the Tactical Figure Control Panel. The user can select its
location, speed, altitude, IFF values, and radar emission parameters. The
changes in the behavior of the track are determined by geographical location
and use waypoints. The user can define as many waypoints as he wants.
For each factor we defined as being important for air defense,
we implemented a reactive agent to monitor its relevant data and inform
predictor track agents of any changes in the data. We identified 17 reactive
agents, all individual threads. These agents are created by track agents. The
communication between track agents and reactive agents is provided by the CMAS
library. Since we defined a different membrane for each track agent, the
connectors extended by a reactive agent of a track cannot find a match with any
other track agent besides the one by which they are created. Besides the
majority of the factors defined in Liebhaber and Smith’s research [29], we also
defined our own factors as reactive agents in the ADL Simulation.
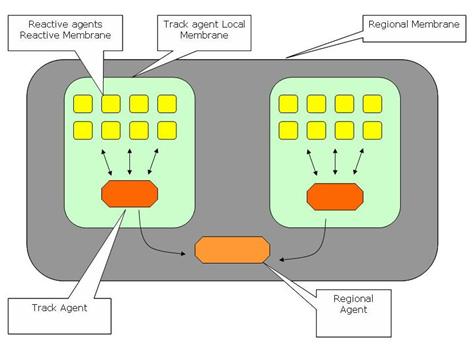
Figure 21.
ADL Simulation Layered Structure
An Airlane reactive agent continuously compares the
aircraft’s location to air routes. Airlanes are standard commercial routes that
civilian aircraft have to follow. Being on an airlane increases the probability
that an aircraft will be civilian but it is not a guarantee. Airlane agents act
differently under different threat levels. If the threat level is low, a
reactive agent is more tolerant of an aircraft outside of an airlane.
The communication between airlane reactive agents and
track agents is provided by the CMAS library connectors and queries. This
reactive agent uses an Integer connector to send its information to the track
agent. The track agent has a query for this connector: “Is the aircraft on the
airlane?” The airlane reactive agent’s connector matches with this query whenever
reactive agent extends its connector.
Airlane reactive agents behave differently for analog and
digital selection. In both selections, the reactive agent opens a window
around the air track. The height and width of the window are determined by the
threat level; a low threat level allows for a bigger window area. If digital is
selected in the Analog & Digital Selection Panel, the Airlane reactive
agent sets the connector to a 100 value when it finds a pixel in the search
area occupied with an air route. Otherwise, the reactive agent sets the
connector to zero. If analog is selected in the panel, the reactive agent looks
for the nearest air route location in the search window. The reactive agent
sets the connector with the value of the difference between the half of the
diagonal distance of edges of window and the nearest range.
Naval ships have an Electromagnetic Support Measurement
equipment to detect electromagnetic emissions. Radio Frequency (RF) Radars have
a fingerprint encoded in its frequency. If an ESM device detects this frequency
and finds a match in its library, the ESM operator can identify the platform of
the radar with its bearing. Civilian and military aircraft have specific
navigation radars. Military fire-control radars and missile-seeker radars are
working in higher frequencies than navigation and surveillance radars. In
Liebhaber’s research, experienced air-defense personnel used the ESM factor as
the major identification factor in experiments [30]. If an aircraft turns on
its fire-control radar, it is an obvious sign of a preparation for an attack on
a ship.
Normally air-defense officers do not directly use the ESM
equipment. An ESM operator uses this equipment, analyzes the data, and reports
to the air-defense officer. The ADL Simulation works the same way. ESM reactive
agents act like an ESM operator and report any changes to the track agent after
analyzing the radar emissions received from the air track. We defined five
different ESM reports in the simulation (see Table 5).
|
RADAR EMISSION TYPE
|
BEHAVIOR
|
|
Civilian aircraft radar emission
|
This is the typical civilian aircraft
navigation radar. They usually work in low frequencies with respect to other
kinds of radars.
|
|
Military aircraft radar emission
|
This is a typical military surveillance
radar emission. The. ESM operator may identify the platform and possible
threat to the ship based on this information.
|
|
Military aircraft fire-control radar
emission
|
Fire-control radar works at the higher
frequencies to detect and track the target. The target can identify a “lock
on” operation with ESM equipment. Lock on is a precondition of an attack on a
ship.
|
|
Missile seeker emission
|
Missile-seeker radars work in higher
frequencies than fire-control radars because they need more precision to
increase the probability of a “hit”. Missile-seeker detection by an ESM
device is a sign of an attack on a ship.
|
|
No radar emission
|
An aircraft has turned off its radar.
|
Table 8.
ESM Reactive-agent Messages to Track Agent
The heading-change reactive agent reports the changes to
the heading of the aircraft. Reactive agents use different levels of tolerance
under different threat levels; under high threat levels they report small
changes to track agents while under low threat conditions they do not. The
reactive agent’s integer connector is extended when the heading change is more
than the accepted limit based on the threat level status. In air defense,
heading change becomes important when an aircraft suddenly turns inbound
towards the ship to attack. In Liebhaber’s study, heading is the third most
commonly used factor by air-defense personnel.
IFF stands for Identification Friend or Foe. The IFF
transponder devices are embedded in the aircraft and respond to the
interrogations if they are on. IFF values are set before the flight and may be
changed by the pilot during the flight. IFF categories and functions are listed
in Table 9. In the ADL Simulation, we defined IFF-1, IFF-2, and IFF-3 reactive
agents to track the IFF values of aircraft. These agents continuously
interrogate the IFF values of the aircraft and report changes to track agents
by extending their connectors.
|
IFF Mode
|
Concept
|
|
Mode
I
|
IFF Mod I is used by military aircraft to show the mission of the aircraft.
|
|
Mod II
|
IFF Mod II is used to show the squadron of the aircraft that it belongs to. These numbers are
unique and kept secret.
|
|
Mod III
|
IFF Mod III is used by both military and civilian aircraft. These values show which air traffic
control is currently controlling the aircraft.
|
|
Mod
IV
|
IFF Mod IV is an encrypted signal that can only be decrypted by a certain cipher. This cipher is
kept secret and only friendly aircraft have the correct cipher.
|
|
Mod
C
|
IFF Mod C shows the altimeter value of the aircraft. Not all the air surveillance radars are
capable of three-dimensional signal processing. Therefore some of them can
only locate the aircraft with ground reference systems.
|
Table 9.
IFF System Modes and Concepts
The IFF-4 reactive agent continuously interrogates the
aircraft and reports the results to track agents if it is different from the
previous interrogation. When aircraft do not carry any IFF value to keep them
undetected, IFF-4 becomes more important to recognize friendly aircraft. The
IFF transponder status reactive agent checks the IFF transponder of the
aircraft and reports this information to the track agent. Normally, all
civilian aircraft keep their IFF transponders turned on. Military aircraft may
turn off their transponders to keep them undetected.
Military interceptors and fighter aircraft can reach
higher accelerations than civilian aircraft. The max acceleration reactive
agent calculates the maximum acceleration of the aircraft and reports this
value to the track agent
The altitude reactive agent checks the altitude of the
aircraft and informs the track agents of the changes in the altitude of the
aircraft. Civilian aircraft usually navigate between 30,000-35,000 ft. on
airlanes. Civilian aircraft have a maximum altitude limit in their
specifications and cannot fly above these limits. Some military aircraft are
designed to fly at high altitudes to avoid detection by air surveillance
radars. Therefore altitude is an important factor in threat identification.
The max altitude reactive agent continuously checks the
altitude and compares this value to current max altitude of the aircraft. If
this value is changed, the reactive agent reports this change to the track
agent with an Integer type connector. Some small aircraft and helicopters
cannot fly over a certain altitude due to lack of sufficient air density.
The maximum speed of an aircraft is another factor used
to predict the type of the aircraft. Military aircraft have larger maximum
speed than civilian aircraft. For example Boeing-type commercial aircraft
speeds vary between 0.75-0.9 mach (1 mach is 1067 km/h). A reactive agent
continuously checks the aircraft speed and compares this value with its max
speed value.
Commercial aircraft usually fly at 30,000 ft. altitude.
They can cruise at lower altitudes only occasionally. However, for military
fighters there is no limit for minimum altitude. A reactive agent checks the
current altitude of the aircraft and reports this value if the current altitude
is lower than the previously recorded minimum altitude.
The speed reactive agent checks the current speed of the
aircraft and reports this value. The speed-change reactive agent continuously
monitors the speed of the aircraft and reports significant speed changes. Its
threshold values are determined by the threat level. Civilian aircraft usually
maintain a specific speed during their cruise. Military aircraft speeds vary
during the flight depending on the mission they are executing.
The Origin reactive agent compares the origin of the
aircraft with the intelligence information about the threat-expected sectors.
In the ADL Simulation, with a very high probability the friendly aircraft originate
from the friendly country sector while hostile aircraft originate from the
threat-expected sectors. Threat intelligence can be set or observed under the
Intelligence menu option.
Military aircraft carry a certain amount of load. This load
includes fuel, weapons, and personnel. They can carry an extra tank for fuel to
fulfill the requirements of the longer missions but then they cannot carry as
many weapons. So military aircraft on strike missions carry a fuel amount as
low as possible to fulfill the mission and carry as many weapons as possible.
These aircraft take off, go directly to mission area, execute the mission, and
return to the main base. Hence determining the origin of an aircraft is
important, and all aircraft that have taken off from or detected in
threat-expected sectors are always suspect.
The radar status reactive agent follows radar emissions.
If there is no radar transmission, the reactive agent extends its connector to
the track agent and reports the radar status.
This reactive agent generates a random number
representing a numeric error, used to make the simulation more realistic. The
accuracy of the data received about an air track decreases with range because
of signal losses due to transmission impairments. These impairments include
free-space loss, attenuation, attenuation distortion, fading, and multi-path
propagations. The random number finder reactive agent determines a random
number limit for all other reactive agents. This limit is determined by the range
of the air track. Figure 22 shows the equation used to determine the error
percentage limit in the ADL Simulation: We used 30 for constant A. the
following equations are our reasonable guesses for the evaluation of the
relevant values.
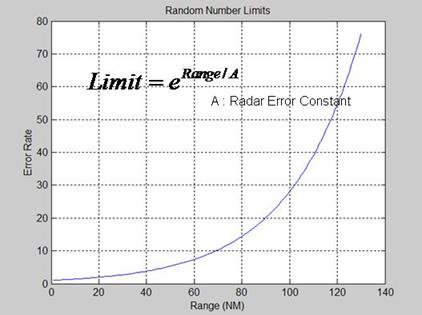
Figure 22.
ADL Random Number Finder Reactive Agent Equation
For sample ranges the equation gives the following error
percentage limits.
|
Range (nm)
|
Random number limit
|
|
128
|
71
|
|
64
|
8.44
|
|
32
|
2.90
|
|
16
|
1.7
|
Table 10.
Sample Error Percentage Limits
This means that at 128 nm range, the kinematics values
that reactive agents receive from the air track are wrong 71% of the time in
the ADL Simulation. Each time a reactive agent has to receive the kinematics
values from the air track, they pick a random number between 0-100. If this
number is more than the random number limit value determined by random number
limit finder reactive agent, they get the kinematics value as it is. Otherwise
they receive the value with an error. The error value is also determined
randomly and added or subtracted from the actual value. Constant A in the
equation may be changed for the type of the air radar. Since this thesis is
unclassified, we could not use the error rate of actual air-surveillance
radars. But the value that we used makes error rates that are reasonable.
The snooper is a special aircraft type whose mission is
to collect intelligence about the location of friendly aircraft and report this
information to enemy headquarters. The snooper stays out of the ship’s weapon
range but most likely inside its sensory range. Snooper aircraft do not usually
carry weapons to attack a ship. The presence of a snooper aircraft in the
environment is a sign of a striker attack.
The snooper detector reactive agent is responsible for
identifying snooper activities. The typical behavior of snoopers is to stay out
of weapon range and orbit in a specific area. Reactive agents keep track of the
reported locations in a two-dimensional array. We found the gradient magnitude
of the locations of the aircraft to find the edges of the polygon that the
aircraft is flying. We used four-neighbor centered formula to find the gradient
magnitude. We then connect these edges to figure out the polygonal area that
the aircraft is flying. If the density of aircraft locations within this
polygon exceeds a threshold, we assume it fits into a typical behavior of a
snooper (see Figure 23).
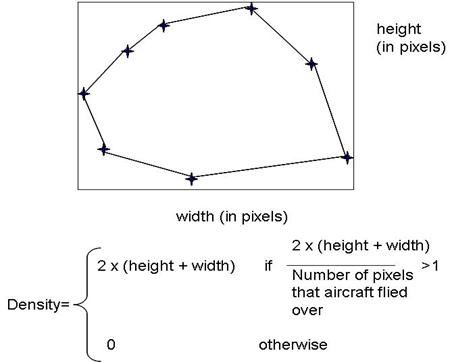
Figure 23.
Snooper Detector Reactive
Agent Equation
For each track in the environment one predictor track
agent is created. The mission of track agents is to predict the identity and
the potential intention of the aircraft. They have limited access to track
data, to only the data that an air-defense team in the CIC receives from the
air track and intelligence. Predictor track agents can retrieve the kinematics
of air tracks including location, speed, heading, altitude, IFF values and ESM
detections.
Predictor agents are located in the middle level of
three-layer structure of the ADL Simulation. They receive the information from
reactive agents and blend all this information to predict the identity of the
aircraft. Predicted identity, detachment, detected snooper behavior, hostile
activity, and location information are reported to regional agents via
connectors.
Predictor track agents use the CMAS library to
communicate with both reactive agents and regional agents. The queries and
connectors are as in Table 11.
|
Type
|
Value
|
Corresponding
Match
|
Criteria
|
|
Identity
Connector CMAS Library Integer Value
|
Predicted
identity of the aircraft:
1 Friend
2.
Civilian
3 Suspect
4 Hostile
5 Unknown
|
Regional
agent “What is identity” query
|
Connector
is extended only when the predicted identity is changed
|
|
Snooper
Connector
CMAS
Library Boolean Value
|
True/
False
|
Regional
agent “Is there Snooper” query
|
Predictor
agent extends this connector if snooper detector reactive agent extends its
connector
|
|
Striker
Connector
CMAS
Library Boolean Value
|
True/False
|
Regional
agent “Is there striker” query
|
Predictor
agent extends this connector if predicted identity is hostile
|
|
Detachment
Connector
CMAS
Library Integer Value
|
A protocol
between the predictor agent and the regional agent to transfer detachment
information.
Value=1000000
x track No+
1000 x Location X +
Location Y
Value=****-***-***
* : Track No
* : X Location information
* : Y Location Information
|
Regional
agent “Is there detachment:” query
|
Predictor
agent extends this connector when a heading change is reported by
heading-change reactive agent
|
|
Location
Connector
CMAS
Library Integer Value
|
Location
information is transferred to other predictor agent. This value is used to
recognize a split operation at the regional-agent level.
|
Predictor
agent “ what is location” query
|
Predictor
agent extends this connector once when it is created.
|
|
Threat
Level Connector
CMAS
Library Integer Value
|
Numeric
threat level information. Threat level is received from regional agent.
|
Reactive
agents “what is threat level query”
|
When
threat level is updated by regional agent
|
|
“Is it on
airlane” Query
|
The
closeness to the nearest air route
|
Airlane
reactive agent airlane Integer type connector
|
Airlane
reactive agent extends its connector when the aircraft is on airlane
|
|
“What is
heading change” query
|
Heading
change of air track
|
Heading
change reactive heading-change agent Integer type connector
|
Heading-change
reactive agent extends its connector when the heading change is more than a
threshold value
|
|
“What is
heading” query
|
Heading
value of the air track
|
Heading-change
reactive agent Integer type heading connector
|
Heading-change
reactive agent extends its connector each time heading is updated
|
|
“What is
ESM” query
|
Radar
emission received from the air track
|
ESM
reactive agent Integer type ESM connector
|
ESM
reactive agent extends its connector when the radar emission received from
the air track is changed
|
|
“What is
speed change” query
|
Change at
speed of the air track
|
Speed
change reactive agent speed change Integer type connector
|
Speed
change reactive agent extends is connector when the change at speed exceeds a
threshold value
|
|
“What is
max speed” query
|
Max speed of the air track
|
Speed
reactive agent max speed Integer type connector
|
Speed reactive
agent extends its connector when the speed of the air track is greater than
current max speed
|
|
“What is
max acceleration” query
|
Max acceleration of the air track
|
Max
Acceleration reactive agent max acc Integer type connector
|
Max Acc reactive
agent extends its connector when the calculated max acc is greater than
current max acc
|
|
“What is
speed” query
|
Speed of
the air track
|
Speed
reactive agent speed Integer type connector
|
Speed
reactive agent extends its connector when the speed of the aircraft changes
|
|
“What is
IFF-1” query
|
IFF-1
value of the air track
|
IFF-1
reactive agent IFF-1 Integer type connector
|
IFF-1
reactive agent extends its connector when the IFF-1 value received from the
air track is changed
|
|
“What is
IFF-2” query
|
IFF-2
value of the air track
|
IFF-2
reactive agent IFF-2 Integer type connector
|
IFF-2
reactive agent extends its connector when the IFF-2 value received from the
air track is changed
|
|
“What is
IFF-3” query
|
IFF-3
value of the air track
|
IFF-3
reactive agent IFF-3 Integer type connector
|
IFF-3
reactive agent extends its connector when the IFF-3 value received from the
air track is changed
|
|
“What is
IFF-4” query
|
IFF-4
value of the air track (True/False)
|
IFF-4
reactive agent IFF-4 Boolean type connector
|
IFF-4
reactive agent extends its connector when the IFF-4 value received from the
air track is changed
|
|
“What is
IFF Transponder status” query
|
IFF
transponder status of the air track
|
IFF
Transponder status reactive agent IFF transponder status Boolean type
connector
|
IFF
transponder status reactive agent extends when the status of transponder is
changed
|
|
“What is
Radar Status” query
|
Radar
status of the air track
|
Radar
status reactive agent radar status Boolean type connector
|
Radar
status reactive agent extends its connector when the radar status is changed
|
|
“What is
altitude” query
|
Altitude
of the air track
|
Altitude
reactive agent altitude Integer type connector
|
Altitude
reactive agent extends its connector when the altitude of the air track is
changed
|
|
“What is
max altitude” query
|
Max altitude of the air track
|
Max
altitude reactive agent max altitude Integer type connector
|
Max altitude reactive agent extends its connector when
the altitude of the air track is greater than current max altitude value
|
|
“What is
min altitude” query
|
Min
altitude of the air track
|
Min
altitude reactive agent min altitude Integer type connector
|
Min
altitude reactive agent extends its connector when the altitude of the air
track is less than current min altitude value
|
|
“What is
origin” query
|
Origin of
the air track:
0 Northeast
1 North
2
Northwest
3 West
4
Southwest
5 South
6
Southeast
7 East
|
Origin
reactive agent origin Integer type connector
|
Origin
reactive agent extends its connector once when the predictor agent is created
|
|
“Is it
snooper” query
|
True/False
|
Snooper reactive
agent “it is snooper” Boolean type connector
|
Snooper
reactive agent extends its connector when it decides that the behavior of air
track fits into snooper behaviors
|
|
“What is
threat level” query
|
Threat
level of air warfare:
0 White
1 Yellow
2 Red
|
Regional
agent “threat level” Integer type connector
|
Regional
agent extends its connector when it changes the threat level of air warfare
|
|
“What is
your position” query
|
Position
information of other tracks
|
Predictor
agents “Location” Integer connector
|
Predictor
agent extends its connector once when it is
created.
|
|
“Is there
merge” query
|
Track
numbers of the air tracks involved in the merge operation
|
Regional
agent “merge occurred” Integer type connector
|
Regional
agent extends its connector when a merge operation is detected
|
|
“Is there
coordinated detachment” query
|
Track
numbers of the air tracks involved in the coordinated detachment operation
|
Regional
agent “coordinated detachment occurred” Integer type connector
|
Regional
agent extends its connector when a coordinated detachment operation is
detected
|
Table 11.
Predictor Track Agent Connectors and Queries
There are five competing models inside each predictor
track agent: Civilian, Unknown, Friendly, Suspect and Hostile. These models are
created at the beginning of the simulation for each track as a ticket. At each
cycle the predictor agent calculates the weight of these tickets. The model
with highest weight for a track is the active model and predicted identity.
Model weights for a specific track can be observed on the feedback panel in our
implementation by selecting the air track. The Unknown identity is default
active model with 0.5 weight. All other models start with 0.0001 weight.
A predictor agent has two main kinds of tickets: identity
and independent. We defined a ticket for each aircraft identity in the ADL
Simulation. Independent tickets are not related directly to identity tickets
but the procedures they execute affect the data values of the frames of the
identity tickets.
A civilian identity ticket contains six data frames: the ESM
frame, the altitude frame, the speed frame, the airlane frame, the IFF
evaluation frame, and the origin frame. These frames except the IFF evaluation
frame are set when a match occurs between queries and corresponding reactive
agent connectors. The IFF evaluation frame is set by the IFF Evaluation
independent procedural ticket.
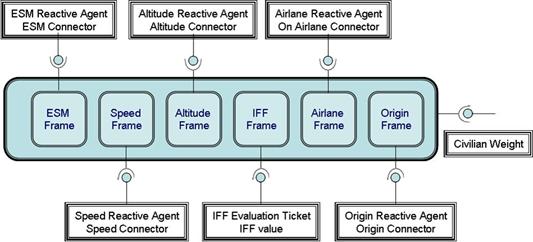
Figure 24.
Civilian Ticket and Frames
A Friendly identity ticket has four data frames: the ESM
frame, the IFF evaluation frame, the origin frame, and the ATO frame. The ESM
and origin frames are set by a match with corresponding reactive agent; the IFF
evaluation and ATO frames are set by independent IFF evaluation and ATO
evaluation tickets.
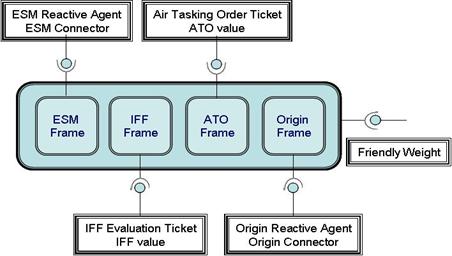
Figure 25.
A Friendly Ticket and Frames
The Hostile identity ticket has ten data frames: the ESM
frame, the range frame, the altitude frame, the airlane frame, the CPA frame, the
origin frame, the IFF evaluation frame, the speed frame, the max speed frame,
and a combination of the altitude, range and CPA frames. All frames except the IFF
evaluation, CPA, and combination frames are set by a match with corresponding
reactive agent connectors. Others are set by independent tickets.
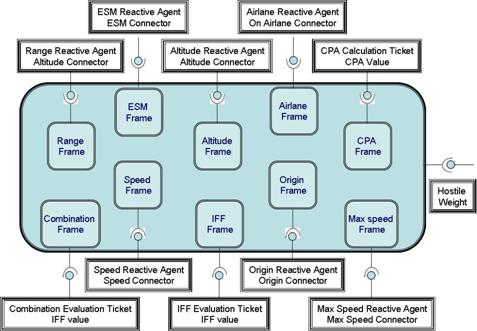
Figure 26.
Hostile Ticket and Frames
A Suspect identity ticket has five data frames: the IFF
evaluation frame, the altitude frame, the origin frame, the speed frame, and the
max speed frame. All frames except the IFF evaluation frame are set by
corresponding reactive agent connectors.
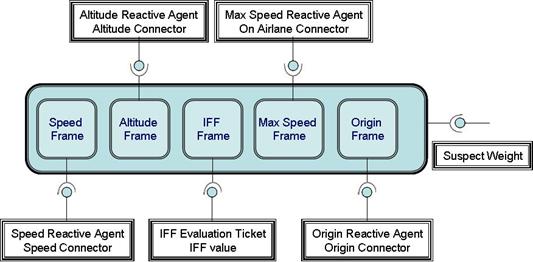
Figure 27.
Suspect Ticket and Frames
An Unknown identity ticket has two data frames: the IFF
evaluation frame and the ESM frame. The ESM frame is set by the ESM reactive
agent while the IFF Evaluation frame is set by the IFF Evaluation independent
ticket.
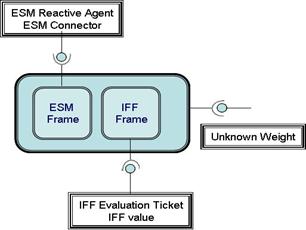
Figure 28.
Unknown Ticket and Frames
The ADL Simulation has also four independent tickets.
Once these tickets are completed they are blended anytime one of their frame
data value is updated. These tickets are completed when all its data frames are
set. The independent tickets are the IFF evaluation ticket, the CPA calculator
ticket, the ATO ticket, and the combination ticket for hostile identity. These
tickets create their own local integration networks and eventually connect with
the identity tickets integration network.
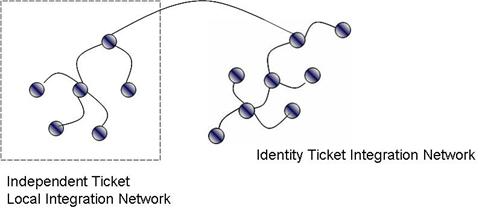
Figure 29.
Connecting Local Independent
Ticket Integration Network to Identity Integration Network
An IFF Evaluation ticket has four data frames: IFF-1,
IFF-2, IFF-3, and IFF-4. These frames are set by reactive agent connectors. An
IFF Evaluation ticket calculates a weight for each identity ticket based on the
values of its data frames.
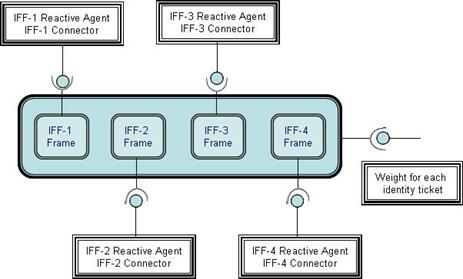
Figure 30.
IFF Evaluation Independent Ticket
The CPA calculator ticket has only one frame: heading
change. Anytime a heading-change reactive agent extends its connector, the CPA
calculator independent ticket calculates a new CPA value based on the new
heading value of the air track. The ATO Evaluation ticket has six frames:
IFF-1, IFF-2, IFF-3, heading, location, and time frames. These frames are set
by corresponding reactive agent connectors. When one of the frames is set, the
ticket is executed and the result sets the ATO Evaluation frame of identity
tickets. The Combination independent ticket has three data frames: Altitude,
CPA, and range frames. The CPA frame is set by CPA calculator independent ticket
and others are set by corresponding reactive agents. If aircraft is inbound,
its range is close, and its altitude is low, a combination ticket sets the
combination frame of the hostile ticket to true. That adds extra weight to the
hostile identity ticket.
The Predictor track agent calculates the weights of each
identity ticket. The ticket with the highest weight becomes the active model
and predicted identity of the track.
The expected ESM behavior from a civilian aircraft is
either a civilian navigation radar emission or no radar emission. If one of
these values is received from ESM reactive agent the weight is increased,
otherwise decreased.
The affect of the air track’s altitude is different for
digital and analog selection of the simulation. For the digital evaluation, the
threshold values are 25,000 and 35,000 ft. since civilian aircraft usually fly
between these levels. Therefore if the altitude of the air track is between
these levels, the weight of the civilian ticket is increased. If analog
evaluation is selected, the formula 5*exp(Altitude*0.0001) is used to calculate
the altitude addition to weight of the ticket for altitude values less than
35,000 ft.
If the aircraft is on airlane the weight is increased if
digital evaluation is selected. If analog evaluation is selected, airlane
reactive agent sets the connector with a value proportionate to the range of
the nearest air route point to location of the air track. If aircraft is not on
airlane, the weight is decreased because it is a requirement to follow air
routes.
The typical speed value for civilian aircraft is between
0.76-0.89 mach. If digital evaluation is selected, the acceptable spectrum for
civilian aircraft speed is between 400 and 500 knots. If analog is selected for
evaluation, the formula 100*sin((Speed-400)*1.81) is used to find the value to
add the weight of the ticket for the speed values between 400 and 550 knots.
If the aircraft took off from a place not in the
threat-expected sector, the weight of the ticket is increased. The IFF
evaluation independent ticket evaluates the current IFF values and finds a
weight for civilian ticket. All these weights are added up and normalized to
find to total weight of the ticket.
ESM devices carry radar fingerprints in their libraries.
If the ESM operator finds a match with a known fingerprint, he can tell even
the name of the platform. In the simulation we assumed that our ESM library is
not complete yet. Therefore in a friendly ticket, the ESM frame only
distinguishes military and civilian aircraft, and among the military aircraft
it distinguishes the ones with hostile intention.
In the simulation, we assumed that all the friendly
aircraft take off from a place with a very high probably that a threat is not
expected. The threat-expected sector is defined before the simulation is
started. If an aircraft takes off from a safe place, the friendly ticket’s
weight is increased, otherwise decreased. The IFF evaluation ticket evaluates a
weight for friendly ticket for the current IFF values. The ATO evaluation
ticket checks the aircraft behaviors with all friendly missions defined in the
ATO. If there is a mission in ATO that matches with the actions of the
aircraft, the weight is increased. The total weight is then normalized.
Air-defense personnel identify most of the threats
against ships by using ESM devices. Missile-seeker radar, a fire-control radar
locked on the ship, or military surveillance radar searching in the area are
all signs of a threat for the ship. For that reason, the ESM frame in hostile
ticket has more effect on the weight of the ticket than other frames.
Air defense of a ship goes from the highest priority
threat to lowest priority one. Highest priority threats are the ones that show
an immediate threat against ship. They are usually the ones closest to ship.
The range frame evaluates the range and increase the weight of the ticket based
on the range of the aircraft. If digital evaluation is selected, the range is
compared to a threshold value. If range is less than that threshold, the weight
is increased. The threshold value can be set on the range threshold setting
panel under Evaluation menu option. If analog evaluation is selected the formula
100*exp(-0.015*Range) is used to find the range effect on weight of the ticket.
The Altitude frame is also evaluated differently based on
the selection of analog or digital. If digital evaluation is selected, we
defined three threshold values of 10000, 20000, and 30000 ft. The ticket adds a
different weight based on the altitude value of the air track. If analog
evaluation is selected the formula 150*exp(-Altitude*0.0001) is used to find the
weight.
The Airlane frame is set by airlane reactive agent. The
weight of airlane frame is the inverse of the value that the reactive agents
set the frame. The closer to airlane is the less weight for airlane frame of
hostile ticket.
For the CPA distance frame, if digital evaluation is
selected, a threshold value is used to determine the weight of the frame. This
threshold value can be set on the CPA threshold selection panel under the
Evaluation menu. If analog evaluation is selected the formula 150*exp(0.02*CPA)
is used to calculate the weight of the frame.
The speed frame of the ticket is another one evaluated
based on the selection of analog or digital approach. If digital evaluation is
selected, speed is checked against a threshold value. This threshold value can
be set on the Speed Threshold Selection Panel dropdown menu under the
Evaluation menu option. If speed is greater than threshold the weight of the
ticket is increased. If analog evaluation is selected, the formula 15*exp(0.02*(speed-450))
is used to calculate the weight of the frame.
Most hostile activities originate from the
threat-expected sector. Therefore the weight of hostile ticket is increased for
air contacts originating from a hostile direction. The IFF Evaluation ticket
calculates a weight for the hostile ticket based on the current IFF values of
the air track. We also used a combination frame (subframe) of three frames of
the hostile ticket. If air track is inbound at low altitude at close range, the
weight of the air track is increased. These three frames behave like an
internal ticket inside hostile ticket. If the max speed of the air track is
more than expected max value from a civilian aircraft the weight of ticket is
also increased.
We used the same algorithm for evaluating the altitude,
speed and maximum speed frames of the suspect ticket as the hostile ticket
frames for both digital and analog evaluations selections. Suspect identity is a
first step of hostile identification. Air-defense officers usually first
identify an air track as suspect if there is not much hostile activity
evidence. As the hostility evidences increases, then they identify the track as
hostile.
There are only two frames in the unknown identity ticket.
The Unknown identity is default identity for any emergent track on the radar
screen. This means that there is not much evidence to identify the air track as
one of the other four identities. Air-defense officers do not tend to leave
this identity on air track for long and they try to change it as soon as they
can. For that reason we defined only two frames for this ticket, the ESM frame
and the IFF evaluation frame.
The ATO ticket sets the ATO frame of the friendly
identity ticket. After the ticket is completed the following pseudocode is
executed in the ticket:
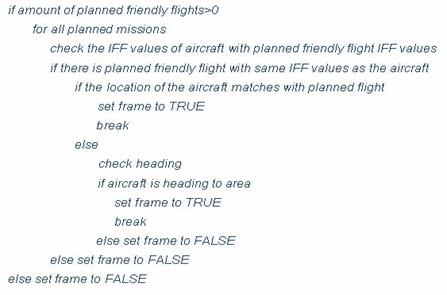
Figure 31.
Evaluation of ATO Frame of Hostile Ticket
The IFF Evaluation ticket has four IFF frames. The
execution of the ticket means finding the meaning of combination of four IFF
frames. IFF Mod I and IFF Mod II may be set or not set. If they are set they
may be right or wrong. That makes total of three possibilities for each IFF Mod I and IFF Mod II. IFF Mod III may be set or not set; hence there are two possibilities
for IFF Mod III. IFF Mod IV may be right or wrong. These conditions create 36
different combinations for IFF Evaluation ticket.

We defined a table for all these possible combinations.
This table includes a weight value for each identity ticket for each
combination. IFF Frames of identity tickets retrieve these weights. The
air-defense team on a ship does the same procedure for IFF checking: Once the
aircraft responds to IFF interrogations, the air-defense team checks the
received IFF values with the values in published books or ATO message.
The CPA ticket calculates the CPA distance of an air
track. The CPA is the closest point that the air track will pass by the ship.
The ADL Simulation’s inbound decision about an air track depends on the CPA
distance. The CPA ticket first finds the real bearing of the ship from the air
track. The ticket then finds the difference between this bearing and heading
value of air track. The heading value is provided by heading reactive agent
heading connector. If the difference is 90° the current point is the closest
point. If it is more than 90°, the closest point had already been passed
otherwise the tangent of the difference is the CPA distance of the air track.
This value is provided to CPA frames of identity tickets.
i. Split
Activity Detection
The split activity detector ticket has two location
frames. The first is set by another predictor track agent location connector.
This connector is set once by the other predictor track agent when the other
track is first created. The other location frame is set by track location data
and the ticket is executed. If the other track location is found close to the
first track location, a split connector is extended. The track numbers of tracks
involving into split operation is then broadcast to all predictor track agents
via split connector.
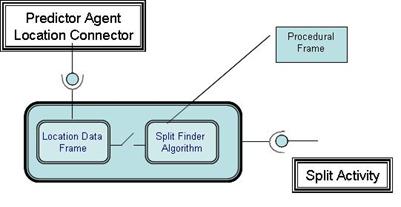
Figure 32.
Predictor Agent Split Activity Detector Ticket
The regional agent works at top of the layered structure
of the ADL Simulation. There is only one regional agent in the simulation. Its
mission is to find coordinated activities between tracks and regional
activities involving more than one track. We defined three regional agent
activities in the simulation: Snooper supported attack activity, coordinated
detachment activity, and merge activities. In a snooper supported coordinated
activity, at first snooper appears in the environment. It is believed that
snooper reports the ship location to air force units and then enemy air force
strikers comes into the environment to attack the ship. This is a coordinated
activity between snooper and a striker. In a coordinated detachment activity,
there are two enemy aircraft involved. Both of them act in coordination when
they are turning. Merge activity is the joining of the two tracks. Based on
these activities, the regional agent determines the threat level and broadcasts
it to all track agents via threat level connector. The connectors and queries
of regional agent are as follows:
|
Type
|
Value
|
Corresponding
Match
|
Criteria
|
|
Threat-level
Connector CMAS Library Integer Value
|
Threat
level of the environment:
1 White
2 Yellow
3 Red
|
Predictor
track agent “What is threat level” query
|
Connector
is extended when regional agent changes the threat level
|
|
Coordinated
detachment Connector
CMAS
Library Integer Value
|
A
protocol between regional agent and predictor agent to transfer coordinated
detachment information.
Value=1000
x track No 1+ track No 2
Value=****-****
* : Track No 1
* : Track No 2
|
Predictor
agent “Is there coordinated detachment” query
|
Regional
agent extends the connector when there are two different detachment
activities at close ranges and near-simultaneous times
|
|
Merge
Connector
CMAS
Library Integer Value
|
A
protocol between regional agent and predictor agent to transfer coordinated
detachment information.
Value=1000
x track No 1+ track No 2
Value=****-****
* : Track No 1
* : Track No 2
|
Predictor
agent “Is merge” query
|
Regional
agent extends the connector when there are two tracks at close location and
altitude
|
|
“What is
identity” query
|
Identity
of the air track
|
Predictor
track agent Identity Integer type Connector
|
Predictor
agent extends the connector when the predicted identity changes
|
|
“Is there
snooper” query
|
True/False
|
Predictor
track agent snooper connector
|
Predictor
track agent extends the connector when a snooper typical behavior detected
|
|
“Is there
striker” query
|
True/False
|
Predictor
track agent striker connector
|
Predictor
track agent extends connector when predicted identity is hostile
|
|
“Is there
detachment” connector
|
Detachment
information of the air track.
Value=1000000
x track No 1+
1000 x Location X +
Location Y
Value=****-****-****
* : Track No
* : Location X
* : Location Y
|
Predictor
agent detachment connector
|
Predictor
track agent extends the connector when the track changes its heading
|
|
“What is
location” query
|
Location
of the air track
Value=1000000
x track No 1+
1000 x Location X +
Location Y
Value=****-****-****
* : Track No
* : Location X
* : Location Y
|
Predictor
agent my location connector
|
Predictor
agent periodically extends its location connector
|
Table 12.
Regional Agent Connectors and Queries
The regional agent has three tickets: the snooper
detector ticket, the merge detector ticket, and the coordinated detachment
detector ticket. The snooper detector ticket has two frames: a snooper frame
and a striker frame set by predictor agent snooper and striker connectors. The
merge detector ticket has two location frames set by my location connectors of
predictor agent. The coordinated detachment ticket has two detachment frames.
The snooper detector ticket is completed by setting both
of its frames. The snooper frame should be set before the striker frame is set.
Therefore this is a synchronous ticket. Once the snooper frame is set, a
striker query is extended by the ticket. The ticket extends its snooper
coordinated activity connector when the striker frame is set after snooper is
set. This is a typical engagement with a third party unit where the snooper
plays the role of a target report unit. After a snooper is detected in the area
by one of the predictor track agents, the threat level is increased to yellow
if it is white since the existence of a snooper in the area is the sign of
upcoming strikes. This is called generalization in blending theory.
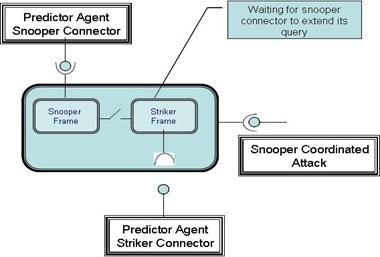
Figure 33.
Regional Agent Snooper Detector Ticket
The merge detector ticket
is executed each time location information is received from one of the predictor
agents. One of the frames is set by this match if this is not the first
location report to the regional agent because a track reported for the first
time cannot merge with another track. Other frames are set by other track
locations in sequence. The ticket is then executed for each other track
location. The merge connector is extended if the ticket finds another track
location with a close distance and similar altitude to first frame location and
altitude. The first frame is a data frame holding the location data of the
reporting predictor agent’s track, and other frame is a procedural frame
executing the ticket for all other track locations
The coordinated detachment detector ticket finds two
detachment activities reported by predictor agent that are close ranges to ship
at close times. Each time a predictor agent reports a detachment activity, this
activity is stored in a data structure and ticket compares the reported
detachment to all detachment activities in this data structure. The data
structure is a stack and data traverse starts from the last imported data. When
ticket cannot find a match within an acceptable time threshold value, it stops
traversing the stack.
As we discussed in Chapter II, Conceptual Blending Theory
has three operations: composition, completion, and elaboration. Composition
attributes outer relations between mental spaces. Completion uses generic
spaces, an existing knowledge base, and experience. Elaboration blends input
mental space information with generic spaces, finds an emergent structure, and
projects this structure to blend space [31].
One of these blending operations in the ADL Simulation is
in detecting merge activity. Figure 40 shows the merge detector ticket
execution.
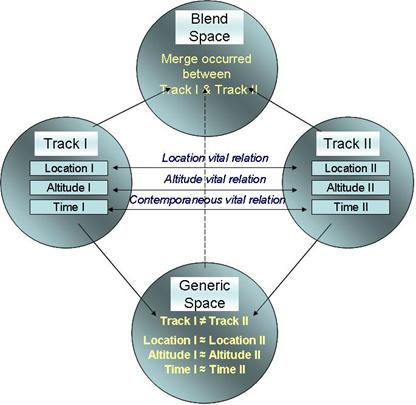
Figure 34.
Merge Detector Blending
Operation
In the blend operation shown above, the ADL Simulation
defines three outer vital relations. They are space vital relations including
location information, altitude information and the contemporaneous time vital
relation. The input mental spaces are the two different tracks. Under the rules
of generic space, merge activity is projected to blend space. The organizing
frame for the two input spaces is an air track organizing frame. Only location,
altitude and time elements of mental spaces participate in the composition
operation of blending theory. Later these three elements perform the completion
operation of blending theory by applying the values of elements with the rules
of generic space. If rules match, merge activity is projected onto blend space.
This blending operation exemplifies the mirror network of the four network
types of Gilles and Turner since both organizing frames are same [32].
In the snooper supported coordinated attack scenario, we
used the cause-effect vital relation in blending. The cause is the snooper and
effect is the upcoming attack operation on ship. The emergent structure in
blend space is a coordinated attack of at least two aircraft. The attacker
aircraft should be in the environment after the snooper is observed. The threat
level is broadcast to all predictor agents. This is called a generalization
operation in blending theory. Making a decision to increase the threat level is
another blending operation where part-whole vital relation is used. The whole
is the coordinated attack on ship supported by the snooper. Since the regional
agent recognizes the whole, it increases the threat level. This is the third
operation of blending theory, elaboration.
We defined three of the blending operations of the ADL
Simulation above. These blending operations are parallel to linguistic blending
operations that we described in Chapter II. Besides their vital relations we
created our own vital relations in the ADL Simulation. Composition is one of
the operations of blending theory and finding these relations is the focal
point of performing composition operation. Attributing these vital relations is
another important point of operation. We managed to link these elements of
input mental spaces via CMAS library in the simulation. Connectors and
corresponding queries are the relations between different mental spaces. In
case of a split operation, when an air track is created, Track II extends its
location connector. This connector finds a match with corresponding query of
all other tracks in the same membrane and blending operation is performed. When
a split operation is found between two tracks the predictor agents then change
their tolerance limit for changes on the behavior of the air track. This is
called generalization in blending theory.
THIS PAGE INTENTIONALLY LEFT BLANK
During the research we examined four sets of issues: the
level of reality of the ADL Simulation, the level of precision of decisions
given by the model, the level of closeness to the decisions given by the
air-defense personnel, and the effect of analog versus digital decision-making
processes on the simulator. But the model is not ready to be embedded into
current tactical warfare systems because more careful work is needed on many of
the details. Our purpose is to get insight into the decisionmaking process and
to show the possibility of implementing a model working close to the way that
the human brain works for a specific task.
Tests used the following default variables:
Range threshold value: 25
nm
Speed threshold value: 500
knots
CPA threshold value: 15
nm
We ran the simulation 10 times for each test, which
resulted in 190 runs. 10 runs tested the level of reality of the ADL
Simulation, 90 runs tested the level of closeness to the way human brain works
with analog decision-making, and 90 runs tested digital decisionmaking. We limited
each scenario time period to 5-6 minutes. The scenarios were as in Table 13.
|
Scenario No
|
Scenario
|
|
1
|
5
civilian aircraft with/without threat intelligence
|
|
2
|
3
civilian aircraft and 1 friendly aircraft with/without threat intelligence
|
|
3
|
3
civilian, 1 friendly, and 1 hostile aircraft with/without threat intelligence
|
|
4
|
2
civilian, 1 hostile, 1 snooper, and 1 friendly aircraft with/without threat
intelligence
|
|
5
|
3
civilian aircraft and a coordinated detachment attack with/without threat
intelligence
|
|
6
|
3
civilian aircraft and a missile attack with/without threat intelligence
|
|
7
|
3
civilian aircraft and a terrorist attack with/without threat intelligence
|
|
8
|
3
civilian aircraft, 1 missile, and a coordinated detachment attack
with/without threat intelligence
|
|
9
|
3
civilian aircraft and a terrorist attack with/without threat intelligence
|
Table 13.
Scenarios Used in the Simulation Test and Analysis
We used an approximate uniform distribution of Java API
for random number selection.
We allocated time to implement a realistic user interface
and environment for the ADL Simulation as much as we did for the implementation
of the cognitive model. We believed that only a simulated environment as close
as possible to a real environment would give us accurate results. In this test
we analyzed how well the real track agents behave based on their roles in the
simulation. The ADL Simulation was tested by two air-warfare officers (AAWO),
two principal warfare officers (PWO), and 3 Air Force pilots. We ran the
simulation ten times with different scenarios for each subject in tests. In
general all of them supported the reality of the simulation. Their main
criticisms were:
·
One expert criticized the lack of issuing warnings to air contacts.
·
Two experts stated that it would be more realistic if the ship
had movement capability.
·
Two experts criticized the lack of a task air-defense missions.
We restricted the simulation to only one ship, but agree that air defense is
not the responsibility of only one ship. Information transformation via
tactical systems is paramount for establishing a real-time tactical air
picture. However to simplify the simulation we eliminated Link services.
·
Three experts criticized the reference system used in the
simulation. We used an (x,y) coordinate system and avoided real-world reference
systems to minimize the computation in the simulation.
·
Four experts declared that the civilian, snooper, coordinated
detachment attack, and missile-attack agents behaved as they should. They said
that the behaviors of the friendly and hostile aircraft could be made more
realistic. We agree with that criticism. However since this research is
unclassified, we avoided real attack scenarios and missions but used the attack
scenarios in game technologies.
The experts confirmed that the simulation is close to a
real environment and its capabilities. However we had to simplify our
simulation in some cases to decrease the computation.
We recorded the actual identities of the aircraft in each
simulation and then compared them with the predictor track agent’s predicted
identities. We ran the simulation ten times for each nine different scenarios.
Table 14, Table 15, and Table 16 show the times in seconds for the model to
identify the contacts correctly.
|
Time to Identify Civilian
|
Analog
process without Threat Intelligence
|
Analog
Process with Threat Intelligence
|
Digital
Process without Threat Intelligence
|
Digital
Process with Threat Intelligence
|
|
Mean
|
17.33
|
18.38
|
17.98
|
20.479
|
|
Standard Deviation (s)
|
5.68
|
7.315
|
4.665
|
5.157
|
|
Variance (s²)
|
32.269
|
53.519
|
21.77
|
26.597
|
Table 14.
Civilian Aircraft ID Results of Tests
Table 14 shows the identification
time of a civilian aircraft under four different circumstances. We found out
that when a threat is expected, the time to identify a civilian aircraft is
increased. When analog processing techniques were used, the model identified
the civilian aircraft more quickly. With analog techniques we also found out
that the weights of the competing models were close to each other. We believe
that by using analog processing techniques, the system is more stable because
the weights of competing models were kept close to each other and there is a
smooth transition between competing models.
|
Time to Identify Friendly
|
Analog
process without Threat Intelligence
|
Analog
Process with Threat Intelligence
|
Digital
Process without Threat Intelligence
|
Digital
Process with Threat Intelligence
|
|
Mean
|
11.139
|
10.74
|
13.09
|
12.599
|
|
Standard Deviation (s)
|
5.324
|
4.135
|
4.722
|
4.606
|
|
Variance (s²)
|
28.347
|
17.1
|
22.301
|
21.222
|
Table 15.
Friendly Aircraft ID Results of Tests
Table 15 shows the time that the simulation took to
identify the friendly aircraft under four different circumstances. The results
show that when a threat is expected, both processing techniques identify the
friendly aircraft in a shorter time. This result supports the results of
Liebhaber’s research. Another result is that an analog processing technique
identifies the friendly aircraft in a shorter time. A further result is that
the standard deviation is decreased when a threat is expected in the
environment.
|
6 Minute Scenario
1 Hostile Track
|
Analog
process without Threat Intelligence
|
Analog
Process with Threat Intelligence
|
Digital
Process without Threat Intelligence
|
Digital
Process with Threat Intelligence
|
|
Time to Identify Hostile (sec)
|
Mean
|
11.3
|
11.52
|
13.3
|
11.059
|
|
Standard
Deviation (s)
|
0.82
|
1.541
|
1.232
|
0.482
|
|
Variance
(s²)
|
0.674
|
2.376
|
1.519
|
0.233
|
|
Total Time aircraft is identified as
Hostile (sec)
|
Mean
|
180.66 (51.21%)
|
274.66 (76.3%)
|
195.959 (56%)
|
114.16 (31.7%)
|
|
Standard
Deviation (s)
|
17.093
|
89.879
|
61.245
|
57.047
|
|
Variance
(s²)
|
313.069
|
8078.37
|
3751.05
|
3254.452
|
|
Total Time aircraft is identified as
Suspect (sec)
|
Mean
|
157.836 (44.74%)
|
63.44 (17.62%)
|
135.94 (38%)
|
227.16 (63.1%)
|
|
Standard
Deviation (s)
|
16.807
|
89.882
|
59.459
|
55.257
|
|
Variance
(s²)
|
282.501
|
8078.89
|
3535.427
|
3053.343
|
Table 16.
Hostile Aircraft ID Results of Tests
Table 16 shows the time that the simulation requires to
identify an aircraft as hostile and suspect, and the time that the simulation
requires to identify an aircraft as hostile under four different circumstances.
The results show that analog processing techniques identify the hostile
activity in a shorter time. When a threat is expected the model identifies the
hostile activities in a shorter time. During the tests, we found out that the
simulation identifies hostile activities as hostile and suspect the majority of
the time. The tests showed analog processing techniques identify hostile
activity faster than the digital processing techniques do. When the threat is
expected, the digital processing techniques identified the hostile activities
less than suspect identification. We observed that the simulation identified
hostile activities in close range, especially when the track is in the range
threshold value which has a 25 nm default. Another interesting result achieved
during the tests is that when the aircraft is far from the ship, the model
tends to identify the air contact as suspect, but as the contact approaches the
ship the model changes the identification from suspect to hostile.
We worked with two PWOs and one AAWO while testing the
closeness of the decisions of the model to decisions of the real air warfare
personnel. We ran each of nine simulations for each of the expert twice, once
with threat intelligence and once without threat intelligence. We asked them to
talk continuously while they made decisions to catch the factors affecting the
decisionmaking process. We recorded their voice on a tape recorder. During the
tests, the datalog option was also kept “On”. We then compared the factors used
by the user with the factors used by the model.
The results showed that all the factors used by the
subjects were a subset of the factors defined in the ADL Simulation. However it
was clear that ADL Simulation was ten times faster than human decisionmaking on
the average. That proves our motivation for the ADL Simulation that we need
computers with their high speed processing capabilities in time sensitive areas
such as air-defense of a naval unit.
The results of the tests also showed that decisions made
by the ADL Simulation were the same as the experts made. We also observed that
the procedure of the experts in threat assessment is checking the factors
affecting the decisionmaking and comparing them with expected values for each
identity in their minds, as observed in Liebhaber’s research.
The ADL Simulation was inspired by
a previous thesis written by Sharif Calfee. We believe that ADL Simulation will
have a similar effect on the subsequent research. In fact our second goal of
replacing the human factor in threat assessment could be accomplished in the
next few years. The ADL Simulation has also reached the point in which we can
create our integration network and traverse in the network in assisting the
human air-defense officers with threat assessment.
We simplified some of the details to reduce the
computation time of the simulation. The simulation could be enhanced upon by
adding movement capability to the ship. The environment could also be improved
by adding a geographical reference system into the model. If this feature is
added to the simulation, by which a user could also add actual maps to the
simulation.
We defined only one surface ship in the environment. The
simulation could be enhanced by adding more surface ships. The coordination
between ships and the task-force air defense is another component to be
examined in the development of the model. We defined the missions of friendly
military aircraft as either a path or area mission, but did not specifically
implement any of the missions. This may make the simulation more realistic in
terms of the variety of aircraft behaviors.
The ADL Simulation is able to create an integration
network and retrieve the mental spaces by using the CMAS library. Each time the
simulation is run, the integration network is created again in the simulation.
A valuable improvement to the simulation is the transfer and addition of the
created knowledge from another simulation's or another agent’s knowledge base.
This can also be labeled as “experience transfer”. The problem of transferring
a knowledge base to another is a compatibility issue. However the ADL Simulation
uses the CMAS library to traverse the integration network. The only requirement
of the second environment to be compatible with an attached knowledge base from
another environment is the ability to use the CMAS library and use the same
queries. The ADL Simulation is ready to transfer an isolated part of integration
network to another agent in another environment. The transfer of an isolated
part of the integration network created in one agent to another agent is a huge
step for agents in gaining experience and then transferring this experience to
other agents. This is like what teachers do to students at the school or what
experienced personnel do to a new hire.
Transferring knowledge to another agent would enable us
to explore another interesting research issue. It is clear that experienced
air-defense personnel use a greater knowledge base than novice air-defense
personnel use. The traditional method of seeing the effects of using a novice
person in air-defense or any area will slow down the simulation process or
extract certain numbers of rules from the simulation. However this process does
not create the real results because slowing down the thinking process of an
agent or banning an agent to use its existing knowledge base would not simulate
the real world situations. In the future, if only a portion of the integration
network is transferred to an agent, this portion would represent the novice
air-defense personnel, we can get the realistic results from the simulation.
The ADL Simulation has two modes of operation: User mode
or model mode. The user mode was originally implemented for test purposes. We
used the user mode of the simulation to compare model-based decisions and human
air-defense decisions. This could be improved to make the ADL Simulation a
training tool for air-defense personnel. The model can determine the experience
level of the air-defense personnel by measuring the level of usage of created
integration network inside the simulation. While experienced air-defense
personnel would use the entire integration network, novice personnel would use
only a portion of the integration network of the model. The differences could
be clue to determine the experience level of the air-defense personnel and lead
us in a certain direction to train personnel.
We used integration networks for the solution to the
problem. There are other ways to model air defense. One of them is using a
Bayesian method. The probability of an event in Bayesian method is the
frequency of observed occurrence in a sample. A simulation could be developed
by using Bayesian methods with probabilities obtained from actual air-defense
exercises.
THIS PAGE INTENTIONALLY LEFT BLANK
The Air Defense Laboratory Simulation is a software
program that models the way an air-defense officer thinks in the threat
assessment process. It uses multi-agent system technology and is implemented
in the Java programming language. We created integration network and modeled
the decisionmaking process of an air-defense officer by using Conceptual
Blending Theory and the CMAS library which implements it. The CMAS library has
the facility of connectors and queries to create the integration network. Each
node of the integration network is a mental space, information packets. These
packets are connected to each other via connectors of CMAS library. The model
of the Simulation can retrieve the required data of any mental space of the
integration network and use them to create new mental spaces. Newly created
mental space is then attached to end of integration network. We represented the
integration network in a tree structure so that a human user can traverse on
this tree and see the decisionmaking process step taken by the cognitive model.
The development of the ADL Simulation demonstrated that
using computers in time-sensitive areas like air-defense as assistant to
air-defense personnel improves the success rate. We demonstrated that the ADL
Simulation is also faster than human decisionmakers and can be used as an
assistant to them in threat assessment. In long term, the ADL Simulation might
serve as a basis for replacement of humans in threat assessment.
We demonstrated that the usage of a blending theory
originated in linguistic can be used in computer science field successfully.
The usage blending theory in the ADL Simulation is not complete yet but we
managed to start implementing our software with this theory. We are confident
that by using blending theory our software can be implemented better.
THIS PAGE INTENTIONALLY LEFT BLANK
THIS PAGE INTENTIONALLY LEFT BLANK
1.
Defense Technical Information Center
Ft. Belvoir, Virginia
2.
Dudley Knox Library
Naval Postgraduate School
Monterey, California
3.
Commander
Space and Naval Warfare Systems Center, San Diego
San Diego, California
4.
Anadolu University Library and Documentation Department
Eskisehir, Turkey
5.
Arastirma Merkezi Komutanligi
Pendik, Istanbul, Turkey
6.
Bilkent University Library
Bilkent, Ankara, Turkey
7.
Bogazici University The Institute of Science and Engineering
Computer Engineering
Bebek, Istanbul, Turkey
8.
Deniz Kuvvetleri Komutanligi
Personel Daire Baskanligi
Bakanliklar, Ankara, Turkey
9.
Deniz Kuvvetleri Komutanligi Kutuphanesi
Bakanliklar, Ankara, Turkey
10.
Deniz Harp Okulu Kutuphanesi
Tuzla, Istanbul, Turkey
11.
Istanbul Technical University
Electronic and Electric Faculty, Department of Computer
Engineering
Ayazaga, Istanbul, Turkey
12.
Istanbul Technical University
Software Development Center
Maslak, Istanbul, Turkey
13.
Middle East Technical University
Department of Computer Engineering
Ankara, Turkey
14.
Military Operations Research Society (MORS)
Alexandria, VA
